Vérification de la déformation d'un arbre de réducteur
Dans cette étude, nous nous intéressons au réducteur équipant les bogies moteurs des tramways Alstom étudié dans le chapitre d'analyse des mécanismes.
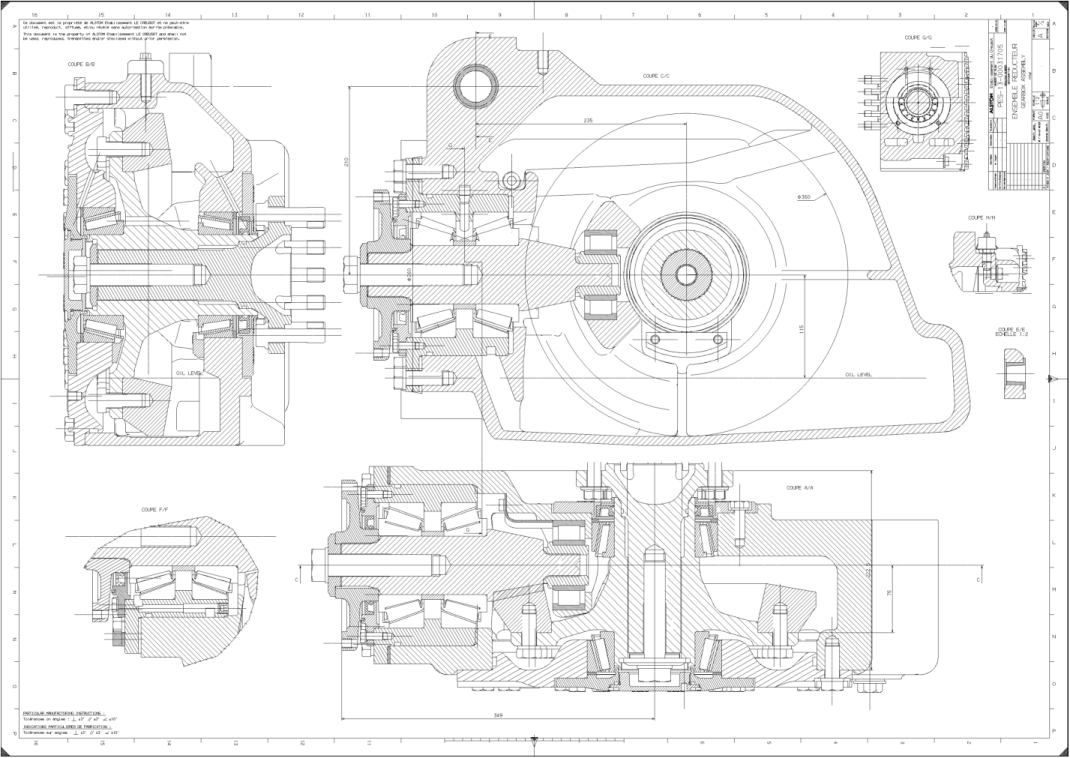
Le plan d'ensemble du réducteur est exposé ci-dessous.
Notre étude se focalise sur le montage de l'arbre d'entrée guidé en rotation par rapport au carter à l'aide de 3 roulements.
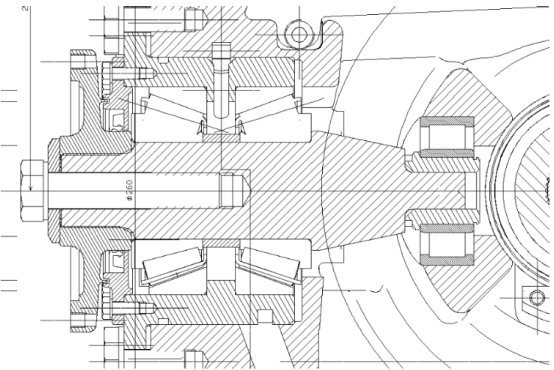
Le guidage de l'arbre peut être modélisé à l'aide de deux rotules et une sphère cylindre :
Nous allons quantifier le déplacement du point de contact de l'engrenage D en considérant le roulement à rouleaux cylindriques absent. Par la suite, nous étudierons le système hyperstatique composé des 3 liaisons à l'aide du logiciel « RDM Le Mans » et comparerons la déformation en D dans les 2 cas. Nous verrons alors l'intérêt de l'ajout du roulement en C dans le fonctionnement du réducteur.
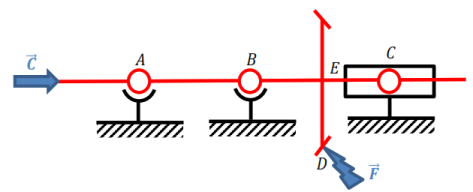
Le modèle étudié est donc le suivant :
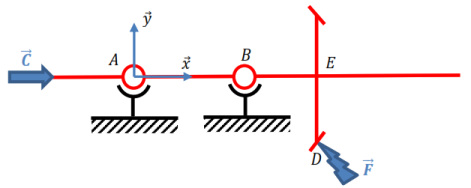
\(AB=a=106~\mathrm{mm} BE=b=42,59~\mathrm{mm} ED=R=28,6~\mathrm{mm}\) \(a+b=l\) |
Pour simplifier l'étude, nous considérerons que l'arbre a une section constante de diamètre \(d=2r=65~\mathrm{mm}\)
De même, on néglige la déformation longitudinale de l'arbre et sa déformation en torsion.
L'arbre est en acier de module d'Young \(E=210~\mathrm{GPa}\)
Le couple moteur maximal en entrée de réducteur est de \(C=-1160é\mathrm{Nm}\)
Les caractéristiques des dentures sont les suivantes \((\alpha=22,5° ;\beta=35° ;\delta=10,56°)\)
On donne : \(F=53593~\mathrm{N}\) \(\{T_{F\rightarrow arbre}\}_G={\begin{matrix}\\ \\ \\ \end{matrix}}_D\left\{\begin{array}{ccll} F_x & 0 \\ F_y & 0 \\ F_z & 0 \end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}={\begin{matrix}\\ \\ \\ \end{matrix}}_D\left\{\begin{array}{ccll} -24160 & 0 \\ 25366 & 0 \\ -40559 & 0 \end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
Nous supposerons que la roue dentée liée à l'arbre de sortie ne se déplace pas sous charge afin de simplifier la démarche (aucune déformation de l'arbre de sortie).
Le cahier des charges précise que le déplacement relatif du point de contact théorique entre les roues dentées ne doit pas excéder la valeur \(D_{\max}=5~\mathrm{\mu m}\) afin de garantir de bonnes conditions de fonctionnement (bruit, usure).
Question
Q1. Déterminer les actions dans les roulements en A et B.
Solution
\({\begin{matrix}\\ \\ \\ \end{matrix}}_A\left\{\begin{array}{ll}0 & C\\0 & 0\\0 & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}+{\begin{matrix}\\ \\ \\ \end{matrix}}_A\left\{\begin{array}{ll}X_{A} & 0\\Y_{A} & 0\\Z_{A} & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}+{\begin{matrix}\\ \\ \\ \end{matrix}}_B\left\{\begin{array}{ll}X_{B} & 0\\Y_{B} & 0\\Z_{B} & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}+{\begin{matrix}\\ \\ \\ \end{matrix}}_D\left\{\begin{array}{ll}F_{x} & 0\\F_{y} & 0\\F_{Z} & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}=\{0\}\)
\({\begin{matrix}\\ \\ \\ \end{matrix}}_B\left\{\begin{array}{ll}0 & C\\0 & 0\\0 & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}+{\begin{matrix}\\ \\ \\ \end{matrix}}_B\left\{\begin{array}{ll}X_{A} & 0\\Y_{A} & aZ_{A}\\Z_{A} & -aY_{A}\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}+{\begin{matrix}\\ \\ \\ \end{matrix}}_B\left\{\begin{array}{ll}X_{B} & 0\\Y_{B} & 0\\Z_{B} & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}+{\begin{matrix}\\ \\ \\ \end{matrix}}_B\left\{\begin{array}{ll}F_{x} & -RF_{Z}\\F_{y} & -bF_{Z}\\F_{Z} & bF_{y}+RF_{x}\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}=\{0\}\)
\(\left[\begin{array}{l}-a\\0\\0\end{array}\right]_{(\mathcal{B})}\wedge\left[\begin{array}{l}X_{A}\\Y_{A}\\Z_{A}\end{array}\right]_{(\mathcal{B})}=\left[\begin{array}{l}0\\aZ_{A}\\-aY_{A}\end{array}\right]_{(\mathcal{B})}\)
\(\left[\begin{array}{l}b\\-R\\0\end{array}\right]_{(\mathcal{B})}\wedge\left[\begin{array}{l}F_{x}\\F_{y}\\F_{Z}\end{array}\right]_{(\mathcal{B})}=\left[\begin{array}{l}-RF_{Z}\\-bF_{Z}\\bF_{y}+RF_{x}\end{array}\right]_{(\mathcal{B})}\)
\(\left\{\begin{array}{l}X_{A}+X_{B}+F_{x}=0\\Y_{A}+Y_{B}+F_{y}=0\\Z_{A}+Z_{B}+F_{z}=0\\C-RF_{z}=0\\aZ_{A}-bF_{z}=0\\-aY_{A}+bF_{y}+RF_{x}=0\end{array}\right.\)
\(-aY_{A}+bF_{y}+RF_{x}=0\) \(\displaystyle Y_{A}=\frac{bF_{y}+RF_{x}}{a}\) \(Y_A=\frac{42,59\times25366+28,6\times(-24160)}{106}\) | \(Y_{A}+Y_{B}+F_{y}=0\) \(Y_{B}=-Y_{A}-F_{y}\) \(Y_{B}=-\frac{(b+a)F_{y}+RF_{x}}{a}\) \(Y_B=-\frac{(42,59+106)\times25366+28,6\times(-24160)}{106}\) | \(aZ_{A}-bF_{z}=0\) \(Z_{A}=\displaystyle \frac{b}{a}F_{Z}\) \(Z_A=-\frac{42,59}{106}40559\) | \(Z_{A}+Z_{B}+F_{z}=0\) \(Z_{B}=-Z_{A}-F_{z}\) \(Z_{B}=-\displaystyle \frac{a+b}{a}F_{Z}\) \(Z_B=\frac{106+42,59}{106}40559\) |
\(Y_A\simeq3673,2~\mathrm{N}\) | \(Y_B\simeq-29039,2~\mathrm{N}\) | \(Z_A\simeq-16296,3~\mathrm{N}\) | \(Z_B\simeq56855,3~\mathrm{N}\) |
Question
Q2. Déterminer le torseur de cohésion le long de l'arbre.
Solution
Tronçon AB : \(x\in]0, a[\)
\(\{T_{c}\}_G=-\{T_{ext\rightarrow E_1}\}_G\) \(-\{T_{ext\rightarrow E_1}\}_A=-{\begin{matrix}\\ \\ \\ \end{matrix}}_A\left\{\begin{array}{rclrcl}0 & C\\0 & 0\\0 & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}-{\begin{matrix}\\ \\ \\ \end{matrix}}_A\left\{\begin{array}{rclrcl}X_{A} & 0\\Y_{A} & 0\\Z_{A} & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
\(-\{T_{ext\rightarrow E_1}\}_A=-{\begin{matrix}\\ \\ \\ \end{matrix}}_A\left\{\begin{array}{rclrcl}X_{A} & C\\Y_{A} & 0\\Z_{A} & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
\(\left[\begin{array}{cl}-x\\0\\0\end{array}\right]_{(\mathcal{B})}\wedge\left[\begin{array}{rcl}X_{A}\\Y_{A}\\Z_{A}\end{array}\right]_{(\mathcal{B})}=\left[\begin{array}{cl}0\\xZ_{A}\\-xY_{A}\end{array}\right]_{(\mathcal{B})}\)
\(-\{T_{ext\rightarrow E_1}\}_G=-{\begin{matrix}\\ \\ \\ \end{matrix}}_G\left\{\begin{array}{rclrcl}X_{A} & C\\Y_{A} & xZ_A\\Z_{A} & -xY_A\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
\(\{T_{c}\}_G={\begin{matrix}\\ \\ \\ \end{matrix}}_G\left\{\begin{array}{rclrcl}-X_{A} & -C\\-Y_{A} & -xZ_A\\-Z_{A} & xY_A\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
\(\{T_{c}\}_G={\begin{matrix}\\ \\ \\ \end{matrix}}_G\left\{\begin{array}{rclrcl}-X_{A} & 1160\\-3673 & 16296x\\16296 & 3673x\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
Tronçon BE : \(x\in]a, l[\)
\(\{T_{c}\}_G=\{T_{ext\rightarrow E_2}\}_G\) \(\{T_{ext\rightarrow E_2}\}_D=-{\begin{matrix}\\ \\ \\ \end{matrix}}_D\left\{\begin{array}{rclrcl}F_x & 0\\F_y & 0\\F_z & 0\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
\(\left[\begin{array}{cl}l-x\\-R\\0\end{array}\right]_{(\mathcal{B})}\wedge\left[\begin{array}{cl}F_x\\F_y\\F_z\end{array}\right]_{(\mathcal{B})}=\left[\begin{array}{cl}-RF\\(x-l)F_z\\(l-x)F_y+RF_x\end{array}\right]_{(\mathcal{B})}\)
\(\{T_{ext\rightarrow E_2}\}_G=-{\begin{matrix}\\ \\ \\ \end{matrix}}_G\left\{\begin{array}{rclrcl}F_x & -RF_z\\F_y & xF_z-lF_z\\F_z& -xF_y+RF_x+lF_y\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
\(\{T_{ext\rightarrow E_2}\}_G=-{\begin{matrix}\\ \\ \\ \end{matrix}}_G\left\{\begin{array}{rclrcl}F_x & -RF_z\\F_y & (x-l)F_z\\ F_z&(l-x)F_y+RF_x\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
\(\{T_{c}\}_G={\begin{matrix}\\ \\ \\ \end{matrix}}_G\left\{\begin{array}{rclrcl}-24160 & 1160\\25366 & -40559x+6027\\-40559 & 3078-25366x\end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
Étant donnée la présence de sollicitations de flexion dans les directions \(\vec{y}\) et \(\vec{z}\), nous décomposerons le problème en deux sous problèmes similaires (on se limitera dans cette exercice à l'étude dans le plan \((A,\vec{x},\vec{y})\), voir figure). Pour cela, dans un tronçon \(i\), pour l'étude suivant \(\vec{z}\), nous appellerons \(v_i(x)\) l'équation de la déformée, \(M_{f_z}^i\) le moment fléchissant et \(I\) le moment quadratique associé.
Nous noterons :
\(M_{f_z}^i=A_ix+B_i\) le moment fléchissant correspondant la déformation suivant \(y\).
Question
Q3. Compléter le tableau ci -dessous avec les valeurs numériques.
Tronçon 1 | Tronçon 2 | |
|---|---|---|
\(v(x)\) \(M_{f_z}^i=A_ix+B_i\) | \(A_1\) | \(A_2\) |
\(B_1\) | \(B_2\) |
Solution
Tronçon 1 | Tronçon 2 | |
|---|---|---|
\(v(x)\) \(M_{f_z}^i=A_ix+B_i\) | \(A_1=3673\) | \(A_2=-25366\) |
\(B_1=0\) | \(B_2=3078\) |
Question
Q4. Déterminer la déformée suivant \(\vec{y}\) dans le tronçon 2 (au signe près) \(v_2(x)\), de manière générale en fonction des coefficients \(A_i\), \(B_i\).
Solution
Tronçon AB : \(x\in]0, a[\)
\(EIv_{1}''(x)=(A_{1}x+B_{1})\)
Conditions aux limites de la poutre :
\(v_{1}(0)=v_{1}(a)=0\)
\(I\) étant constant :
\(EIv_{1}'(x)=A_{1}\frac{x^{2}}{2}+B_{1}x+K_{1}^{1}\)
\(EIv_{1}(x)=A_{1}\displaystyle \frac{x^{3}}{6}+B_{1}\frac{x^{2}}{2}+K_{1}^{1}x+K_{1}^{2}\)
Liaison rotule en A (\(x=0\)) : \(v_{1}(0)=0\Rightarrow K_{1}^{2}=0\)
\(EIv_{1}(x)=A_{1}\frac{x^{3}}{6}+B_{1}\frac{x^{2}}{2}+K_{1}^{1}x\)
Liaison rotule en B (\(x=l)\) : \(v_{1}(a)=0\displaystyle \Rightarrow A_{1}\frac{a^{3}}{6}+B_{1}\frac{a^{2}}{2}+K_{1}^{1}a=0\)
\(K_{1}^{1}a=-A_{1}\frac{a^{3}}{6}-B_{1}\frac{a^{2}}{2}\)
\(K_{1}^{1}=-\left(A_{1}\frac{a^{2}}{6}+B_{1}\frac{a}{2}\right)\)
\(K_{1}^{1}=-\frac{a}{6}(aA_{1}+3B_{1})\)
\(EIv_{1}(x)=A_{1}\frac{x^{3}}{6}+B_{1}\frac{x^{2}}{2}+K_{1}^{1}x\)
On aura besoin par la suite de :
\(EIv_{1}'(x)=\frac{A_{1}}{2}x^{2}+B_{1}x+K_{1}^{1}\)
Tronçon BE : \(x\in]a, l[\)
\(EIv_{2}''(x)=(A_{2}x+B_{2})\)
Continuité de la poutre en B :
continuité de la déformée : \(v_{2}(a)=v_{1}(a)=0\); continuité de la rotation : \(v_{2}'(a)=v_{1}'(a)\)
\(I\) étant constant:
\(EIv_{2}'(x)=A_{2}\frac{x^{2}}{2}+B_{2}x+K_{2}^{1}\)
\(EIv_{2}(x)=A_{2}\displaystyle \frac{x^{3}}{6}+B_{2}\frac{x^{2}}{2}+K_{2}^{1}x+K_{2}^{2}\)
Continuité de la rotation en B : \(v_{2}'(a)=v_{1}'(a)\)
\(\displaystyle \Rightarrow A_{2}\frac{a^{2}}{2}+B_{2}a+K_{2}^{1}=\frac{A_{1}}{2}a^{2}+B_{1}a+K_{1}^{1}\)
\(\displaystyle \Rightarrow K_{2}^{1}=\frac{A_{1}}{2}a^{2}+B_{1}a+K_{1}^{1}-A_{2}\frac{a^{2}}{2}-B_{2}a\)
\(\displaystyle \Rightarrow K_{2}^{1}=\frac{a^{2}}{2}(A_{1}-A_{2})+a(B_{1}-B_{2})+K_{1}^{1}\)
Déformée nulle en B : \(v_{2}(a)=0\)
\(\Rightarrow A_{2}\frac{a^{3}}{6}+B_{2}\frac{a^{2}}{2}+K_{2}^{1}a+K_{2}^{2}=0\)
\(\Rightarrow K_{2}^{2}=-A_{2}\frac{a^{3}}{6}-B_{2}\frac{a^{2}}{2}-K_{2}^{1}a\)
\(v(x)=\left\{\begin{array}{l} v_{1}(x)\forall x\epsilon]0,\ a[\\ v_{2}(x)\forall x\epsilon]l,\ 2a[ \end{array}\right.\)
Au bilan :
\(v_{1}=\frac{1}{EI}\left[A_{1}\frac{x^{3}}{6}+B_{1}\frac{x^{2}}{2}+K_{1}^{1}x\right]\)
\(v_{2}=\frac{1}{EI}\left[\frac{A_{2}}{6}x^{3}+\frac{B_{2}}{2}x^{2}+K_{2}^{1_{\chi}}+K_{2}^{2}\right]\)
\(K_{1}^{1}=-\frac{a}{6}(aA_{1}+3B_{1})\)
\(K_{2}^{1}=\frac{a^{2}}{2}(A_{1}-A_{2})+a(B_{1}-B_{2})+K_{1}^{1}\)
\(K_{2}^{2}=-A_{2}\frac{a^{3}}{6}-B_{2}\frac{a^{2}}{2}-K_{2}^{1}a\)
Question
Q5. En déduire la flèche de l'arbre en \(E\) suivant \(\vec{y}\).
Solution
Avec les valeurs trouvées précédemment, on trouve : \(K_{2}^{1}=-170\) et \(K_{2}^{2}=5,7\).
Ce qui donne un flèche (valeur maximale de la déformée, donc en \(x=l\)) de \(v_{2}(l)=\frac{1}{EI_{G}}[\frac{A_{2}}{6}l^{3}+\frac{B_{2}}{2}l^{2}+K_{2}^{1}l+K_{2}^{2}]\).
Soit une valeur de \(v(l)\simeq3,33~\mathrm{\mu m}\)
Question
Q6. Déterminer la rotation de la section autour de \(\vec{z}\) en \(E\).
Solution
La rotation de la section en \(E\) correspond à la dérivée de la déformée en \(x=l\) :
\(\theta_{z}(l)=v_{2}'(l)=\frac{1}{EI_{G_{Z}}}[\frac{A_{2}}{2}l^{2}+B_{2}l+K_{2}^{1}]=0,00004~\mathrm{rad}\)
Question
Q7. Déterminer le déplacement du point \(E\) suivant \(\vec{x}\) issu de la traction compression de l'arbre.
Solution
On sait que \(\sigma=E\varepsilon\) (loi de Hooke), avec \(\sigma=\frac{N}{S}\) et \(\varepsilon=\frac{\Delta L}{L}\)
d'où : \(\Delta L=u(l)=\frac{F_{x}b}{ES}=\frac{-24160\times0,04259}{210000000000\times0,003318307}=-1,48~\mathrm{\mu m}\)
Question
Q8. Justifier le fait que la torsion de l'arbre ne soit pas étudiée.
Solution
Le mouvement de torsion de l'arbre ne va que décaler l'arbre de sortie par rapport à sa position théorique dans le cas où il n'y aurait pas de torsion, mais en aucun cas il ne va altérer le contact entre les roues dentées.
C'est un mouvement sur la mobilité du système...
Question
Q9. Finalement, donner l'expression du déplacement du point \(D\) issu de la déformation en flexion de l'arbre.
Solution
Calcul du déplacement en D du à la rotation : \(\left[\begin{array}{c}0\\R\\0\end{array}\right]_{(\vec{x},\vec{y},\vec{z})}\wedge\left[\begin{array}{c}0\\0\\\theta_{z}\end{array}\right]_{(\vec{x},\vec{y},\vec{z})}=\left[\begin{array}{c}R\theta_{z}\\0\\0\end{array}\right]_{(\vec{x},\vec{y},\vec{z})}\)
\({\begin{matrix}\\ \\ \\ \end{matrix}}_E\left\{\begin{array}{cc}0 & u(l)\\ 0 & {v}(l) \\\theta_{z} & 0 \end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}={\begin{matrix}\\ \\ \\ \end{matrix}}_D\left\{\begin{array}{cc}0 & x(l)+R\theta_{z}\\\ 0 & {v}(l) \\\theta_{Z} & 0 \end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}={\begin{matrix}\\ \\ \\ \end{matrix}}_D\left\{\begin{array}{cc}0 & -0_{\prime}34\times10^{-6}\\ 0 & 3,33\times10^{-6}\\0,00004 & 0 \end{array}\right\}_{(\vec{x},\vec{y},\vec{z})}\)
\(D=\sqrt{(u(l)+R\theta_{z})^{2}+v(l)^{2}}\simeq3,35\mathrm{\mu m}\)
Pour de bonnes conditions de fonctionnement de l'engrenage, ce déplacement ne doit pas excéder quelques microns (5 microns).
Question
Q10. Les déplacements obtenus respectent -ils les critères du cahier des charges ?
Solution
\(D\simeq3,35\mathrm{\mu m}\), cette valeur respecte le cahier des charges, car elle ne dépasse pas les 5 microns.
Il faudrait toutefois vérifier que la déformation dans le plan \((A,\vec{x},\vec{z})\) n'engendre pas un déplacement supplémentaire qui ferait que le cahier des charges n'est plus respecté. (voir dernière question d’entraînement pour cette vérification, on trouvera que le cahier des charges n'est plus respecté, le déplacement étant trop important)
Question
Q11. En déduire l'intérêt de la réalisation d'un montage hyperstatique comme dans la solution réelle.
Solution
Il est donc nécessaire de limiter les déformations en flexion de l'arbre afin de diminuer ce déplacement, pour cela un 3ème roulement est ajouté et rend le système hyperstatique.