Prise en main de la plate-forme Stewart
Simuler un mouvement de houle
On souhaite réaliser une simulation du mouvement de houle (mouvement des vagues) de l'embase supérieure par rapport à l'embase fixe pour comprendre comment fonctionne le système.
Double-cliquer sur l'icône Stewart puis mettre sous tension la plate-forme (interrupteur sur le côté de l'embase grise) et placer les trois potentiomètres (situés sur la base grise du système) au maximum. Cliquer sur Fichier / Ouvrir et sélectionner le fichier houle09.ste [zip] (à dézipper si nécessaire) puis cliquer sur OK. Cliquer sur l'îcône Calcul puis Lancer. Sélectionner : Pilotage / Action / Aller Retour / OK / ... / Arrêt
Simuler un mouvement de roulis
Dans le cas d'une simulation de vol, la plateforme doit être capable de recréer les mouvements d'un avion. Ceux-ci peuvent se décomposer en deux types : 3 translations (du centre de gravité de l'avion) et trois rotations autour d'axes relatifs à l'avion (le roulis, le lacet et le tangage).
Pour piloter la plateforme, le logiciel permet d'entrer 6 lois de commande correspondant à la position du centre de l'embase supérieure (3 coordonnées) et l'orientation de cette embase par rapport à l'embase inférieure (3 angles de rotation)
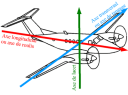
On associe un repère à l'embase inférieure et un repère à l'embase supérieure .
On suppose que l'axe de l'avion est l'axe de l'embase supérieure. Repérer sur l'embase supérieure cet axe.
Cliquer ensuite sur Fichier / Nouveau : une visualisation de la maquette apparaît. La position de la maquette est d'abord simulée par le logiciel puis transmise réellement à la maquette. Cliquer sur l'icône ![]() et sélectionner : Modèle / Inverse , Calcul / Géométrique et X positions. Ensuite choisir Acquisition / Inverse . Ramener la table dans sa position de référence si nécessaire : Référence / OK / Calcul / OK / Pilotage / Action.
et sélectionner : Modèle / Inverse , Calcul / Géométrique et X positions. Ensuite choisir Acquisition / Inverse . Ramener la table dans sa position de référence si nécessaire : Référence / OK / Calcul / OK / Pilotage / Action.
Dans le menu Acquisition / Inverse : qi_act , imposer ZM=70 et mettre une valeur non nulle dans le paramètre qui vous semble correspondre au roulis (ne pas mettre une valeur trop grande < 0.4 ), mettre 0 pour tous les autres paramètres.
Cliquer sur l'icône ![]() . Visualiser la position (et le mouvement) correspondante de la plate-forme en sélectionnant Pilotage / Action. (Recommencer si nécessaire)
. Visualiser la position (et le mouvement) correspondante de la plate-forme en sélectionnant Pilotage / Action. (Recommencer si nécessaire)
On souhaite analyser la commande de la plateforme pour un mouvement cyclique de roulis (mouvement sinusoïdal).
Dans le même menu précédent, imposer pour le paramètre repéré précédemment la valeur 0.4*sin(U) (avec et 0 pour les autres paramètres) et dans les bornes indiquer inf=0, sup=2*PI. Prendre 500 points dans Nb_points. Cliquer sur OK. Cliquer ensuite sur l'icône ![]() .
.
Visualiser la position (et le mouvement) correspondante de la plate-forme en sélectionnant Pilotage / Action puis dans la fenêtre pilotage en cliquant sur Simple.
Changer l'amplitude de l'angle de roulis et rechercher la valeur maximale pouvant être testée sur la plate-forme.
On montre ainsi que les mouvements de la plate-forme sont limités par la géométrie des vérins et de la plate-forme

La partie commande du système calcule les consignes de position à appliquer sur chacun des axes à des instants réguliers (période d'échantillonnage) pour obtenir la trajectoire désirée de la plateforme puis elle transmet ces consignes aux modules électroniques de commande des axes, via la carte d'interface implantée dans l'ordinateur.
Deux paramètres permettent de contrôler cette commande :
le nombre de points correspondant au nombre de consignes différentes envoyées aux vérins (donné dans la fenêtre précédente)
la période d'échantillonnage T accessible par le paramètre Tempo du menu Pilotage.
Mettre Nb_points=50 dans le menu précédent et une Tempo de 400ms (dans le menu pilotage tempo-forcée). Observer le comportement de la plateforme. Réaliser une nouvelle observation pour Nb_points=500 et une Tempo de 10ms puis une Tempo de 2ms.