Moteur Asynchrone
Principe de fonctionnement
La fonction du moteur électrique asynchrone est de générer un mouvement de rotation (vitesse angulaire ) à partir d'une commande électrique sinusoïdale de fréquence variable. La vitesse angulaire dépend du couple résistant auquel doit faire face le moteur. Le fonctionnement du moteur asynchrone est quasiment semblable à celui du moteur synchrone (Voir animation sur la page moteur synchrone). Les stators sont identiques dans les deux machines seulement le rotor d'un moteur asynchrone au lieu d'être constitué d'un aimant ou d'un électroaimant est un assemblage de deux anneaux fixés par des conducteurs (appelé « cage d'écureuil »). Ainsi lorsque le stator induit un champ magnétique tournant, le rotor tente de suivre ce champ magnétique sans toutefois atteindre la vitesse de ce dernier ; un décalage se crée alors, on parle de glissement. Pour le moteur asynchrone, la vitesse du rotor n'est donc pas proportionnelle à la fréquence du courant qui alimente le stator.
Il est composé de \(3p\) bobines alimentées par un système de tension triphasées de fréquence \(f\) . Ces \(3p\) bobines créent un champ magnétique tournant à la pulsation de synchronisme qui se répartit sinusoïdalement dans l'entrefer (espace entre le rotor et le stator) de la machine.
On a \(N_s=f/p\) avec :
\(N_s\) la vitesse de rotation du champ magnétique.
\(f\) fréquence électrique
Le moteur asynchrone est largement utilisé dans l'industrie, car sa simplicité de construction en fait un matériel très fiable ne nécessitant pas beaucoup d'entretien.
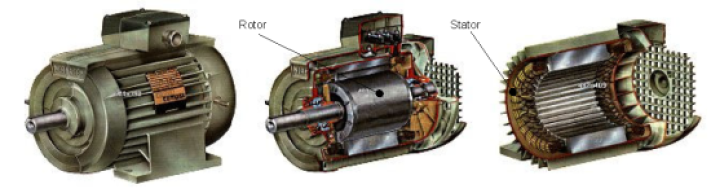
Il est constitué :
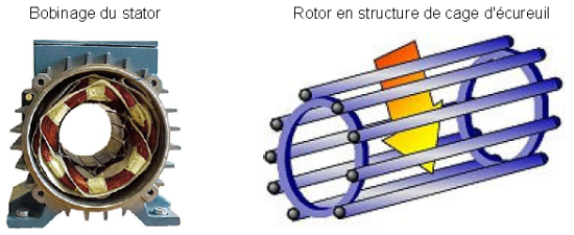
d'une partie fixe, le stator, qui comporte le bobinage ;
d'une partie rotative, le rotor, qui comporte un bobinage en cage d'écureuil.
Pour un moteur asynchrone, le couple varie en fonction de la fréquence de rotation du moteur.
La caractéristique dynamique d'un moteur asynchrone est la suivante :

Asynchrone:
Vitesse du rotor plus petite que la vitesse du champ tournant (sinon, pas de couple). L'augmentation de la charge fait diminuer la vitesse. (augmentation du glissement -->plus de variation du flux dans un matériaux conducteur -->de courant dans le rotor et de couple . Le rotor est constitué de bobinage en court circuit (p.ex cage d'écureuil) .
Certains gros moteurs ont la possibilité d'ajouter des résistances série pour diminuer le courant dans le rotor donc le courant d'alimentation.
Inconvénients :
La vitesse dépend de la charge Pour les moteur de moyenne et grande puissance et à temps de démarrage long(inertie) , il faut gérer la pointe de courant de démarrage égale à 6-8 fois le courant nominal. Le cos ϕ à vide est très faible (non réglable) Rendement moins bon (0.9 pour gros moteurs).
Utilisation :
- Le grand standard industriel- Entraînements divers- Parfois utilisé comme génératrice dans les éoliennes.