Présentation du contexte de l'étude
Véhicule Clever
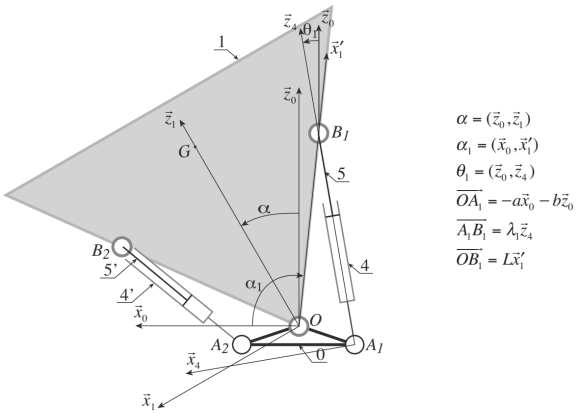
On s'intéresse au mouvement de la cabine du véhicule à trois roues Clever dont la cabine s'incline à l'image d'une moto pour prendre un virage.

Pour piloter le mécanisme, il est nécessaire de connaître l'angle de la cabine en fonction de l'élongation des vérins. L'étude géométrique permet d'obtenir facilement l'élongation en fonction de l'angle :
\(\lambda_1(\alpha) = \sqrt{\left(L\cos(\alpha-130^{\circ}) +a\right)^2+\left(L\sin(\alpha-130^{\circ})-b\right)^2}\)
avec \(\alpha\in[{-50^{\circ}}, {50^{\circ}}]\), \(a =0.14~m\), \(b = 0.046~~m\) et \(L = 0.49~~m\).
L'objectif du TP est de déterminer l'angle \(\alpha\) pour une valeur d'élongation\( \lambda_1\) donnée.