Communiquer
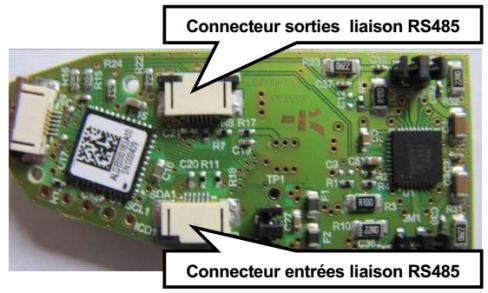
La liaison utilisée pour communiquer avec le reste du Robot est une liaison série RS485. La liaison RS485 est réalisée par 2 fils en mode différentiel. Il s'agit d'une transmission synchrone bidirectionnelle (semi-duplex). La norme permet des transmissions multipoints (32 émetteurs/32 récepteurs).