Acquérir position angulaire
Principe général
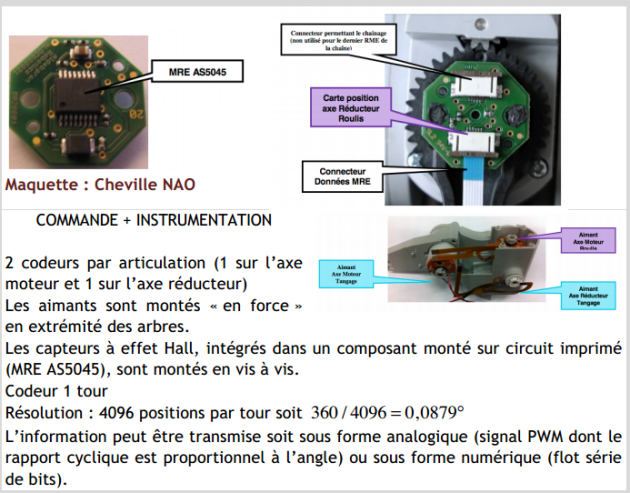
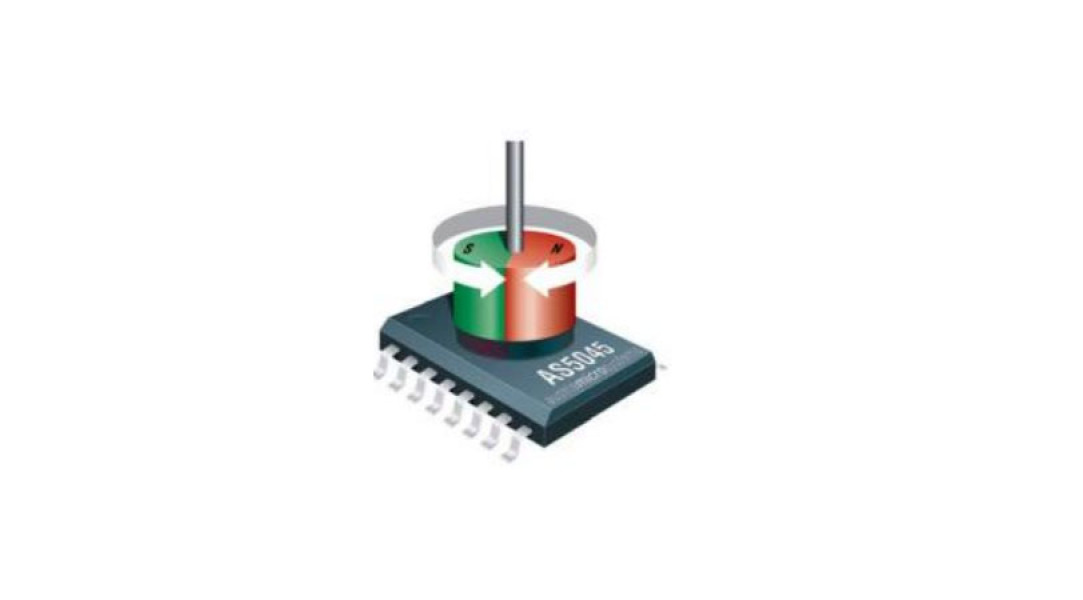
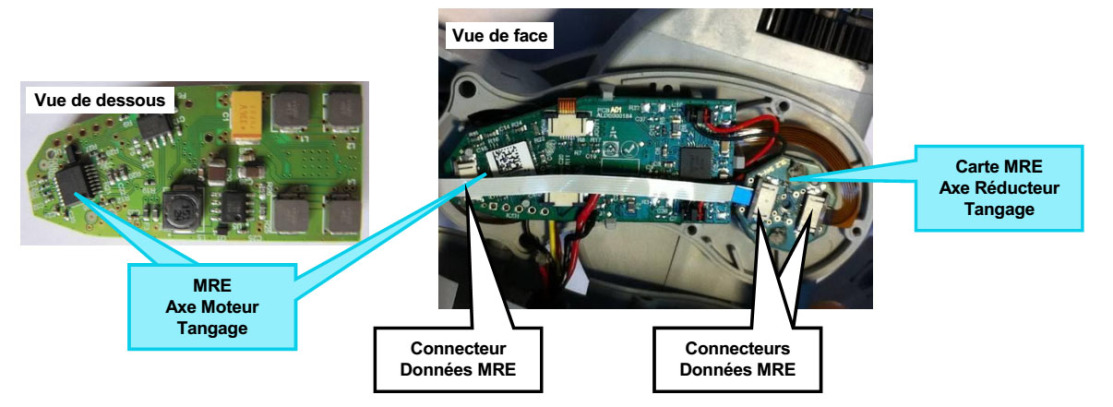
Les mesures de positions sont effectuées par 4 capteurs magnétiques MRE AS5045. Pour chaque axe (Pitch et Roll), il y a un capteur sur l'axe du moteur et un capteur sur l'axe en sortie du réducteur. Ce circuit est un codeur rotatif magnétique sans contact. Il combine un DSP et des capteurs à effet Hall intégrés. Pour mesurer un angle, un aimant circulaire centré au dessus du composant est nécessaire.
La position absolue de l'aimant mesurée avec une résolution de 0,0879° (12 bits, 360°). L'information peut être transmise sous forme analogique (signal PWM dont le rapport cyclique est proportionnel à l'angle) ou sous forme numérique (flot série de bits).
Pour aller plus loin
Répartition de l'induction magnétique
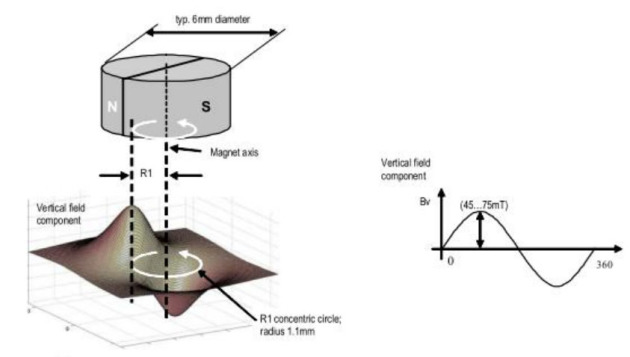
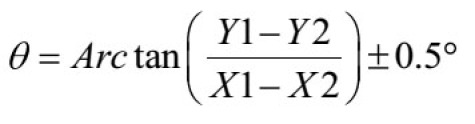
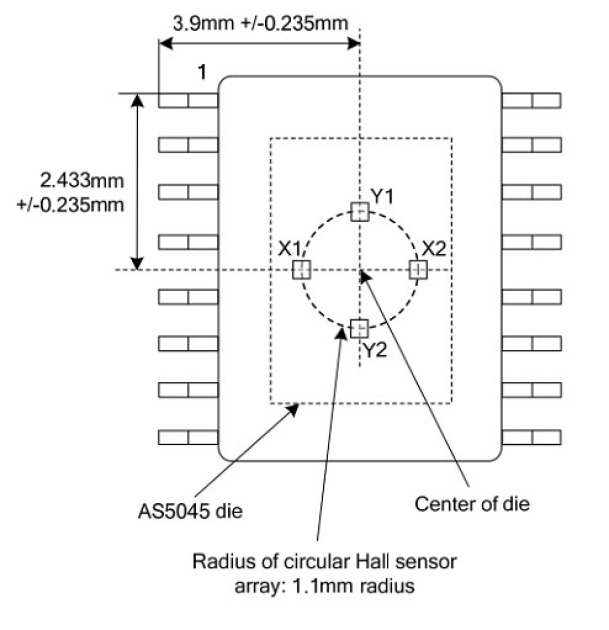
Le composant possède quatre capteurs à effet Hall placés symétriquement sur un cercle dont le centre est le centre du composant.
La différence des signaux issus des capteurs Y1 et Y2 est proportionnelle au sinus de l'angle position.
La différence des signaux issus des capteurs X1 et X2 est proportionnelle au cosinus de l'angle position.
Le déplacement angulaire est donnée par la relation :