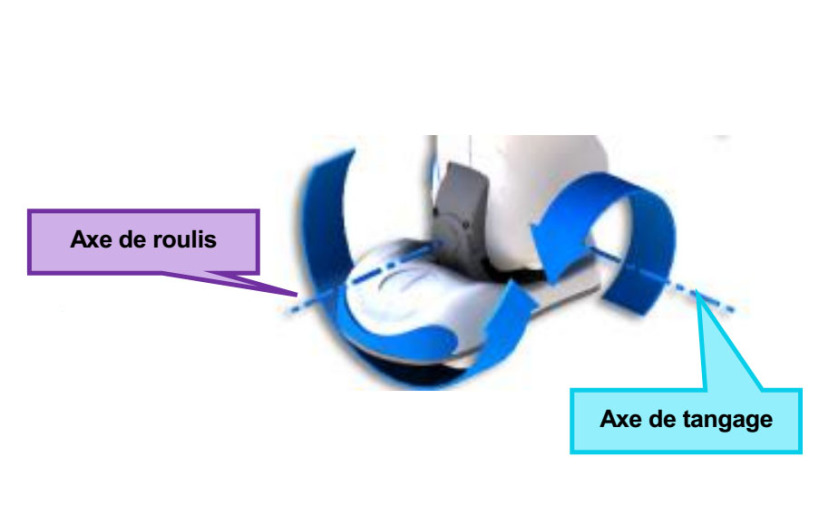
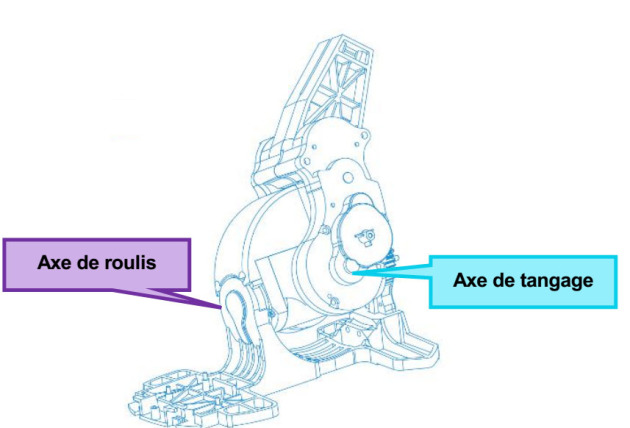
La cheville du robot NAO
Pour assurer au robot NAO des performances élevées, le constructeur a choisi d'asservir la position des axes de tangage et de roulis de sa cheville.
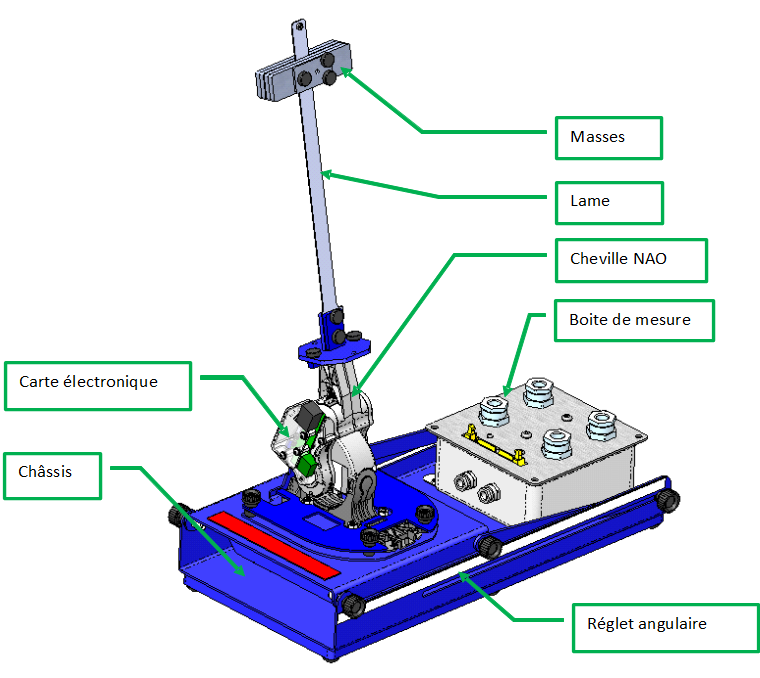
Système étudié en laboratoire
Attention :
La cheville comporte deux axes chacun est asservi chacun d'eux peut être asservi grâce à un capteur situé à la sortie du moteur ou à la sortie du réducteur. Ceci donne quatre asservissements possible à étudier. Pour la partie SLCI on étudiera de préférence l'axe de tangage avec le capteur en sortie de moteur.