Description du fonctionnement des axes
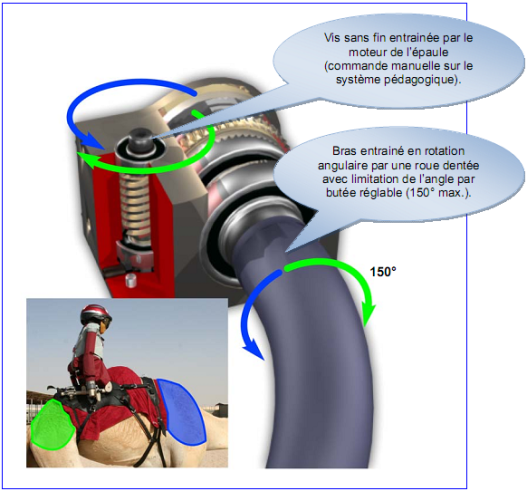
Axe d'épaule
Sur le robot Jocket l'axe d'épaule n'est pas piloté. On peut toutefois étudié l'influence du positionnement du bras en modifiant l'orientation de celui-ci à l'aide d'une clé 6 pans.
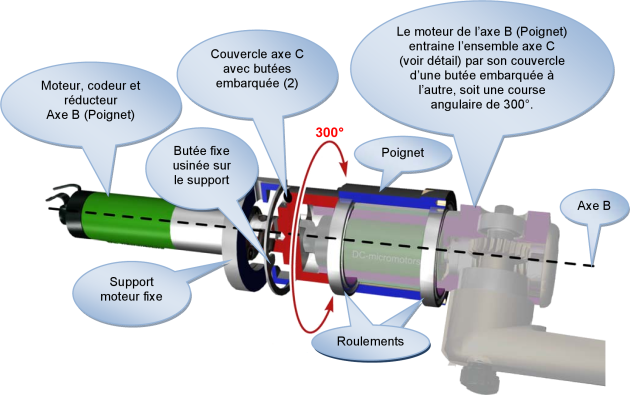
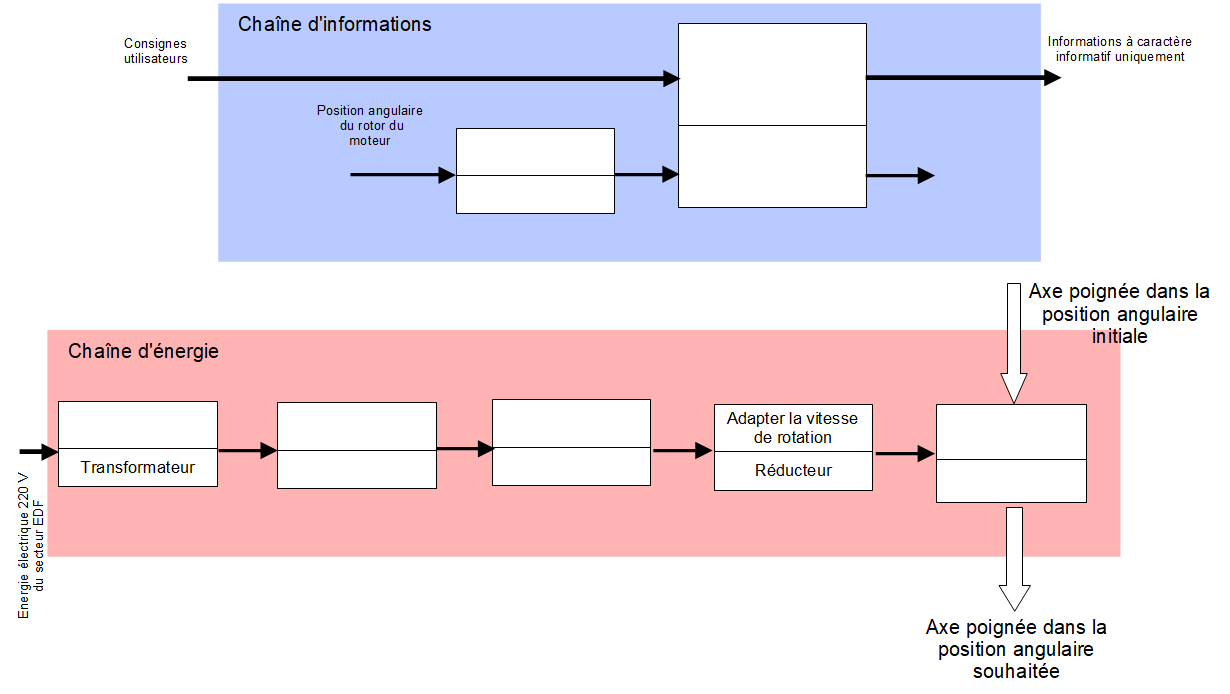
Axe de poignée
On s'intéresse au fonctionnement de l'axe de poignée (Axe B) permettant de contrôler la frappe.
La mise en mouvement de l'axe de poignée est réalisée par :
un moteur à courant continu
un réducteur
poignée en liaison pivot par l'intermédiaire de 2 roulements par rapport à au support
Une fois la consigne envoyée, l'axe de poignée commence à se mettre en mouvement. La rotation générée est mesurée à l'aide d'un codeur incrémental (capteur de position relative) qui envoie une information à la carte électronique. La carte électronique compare l'image de l'angle réel à l'image de l'angle de consigne puis commande le moteur à courant continu par l'intermédiaire d'un hacheur.
Pour présenter et regrouper l'ensemble des composants intervenant dans l'axe de poignée, on peut utiliser une description par chaînes fonctionnelles (documents partiellement remplis ci-dessous).
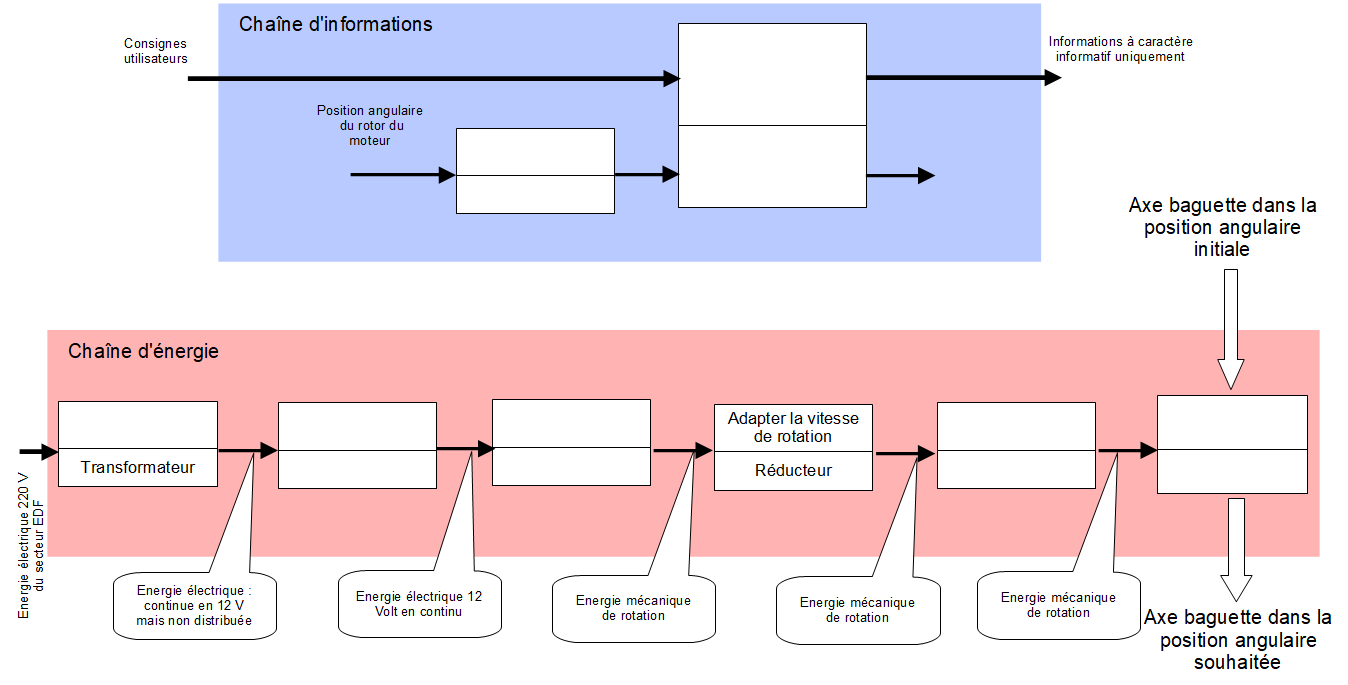
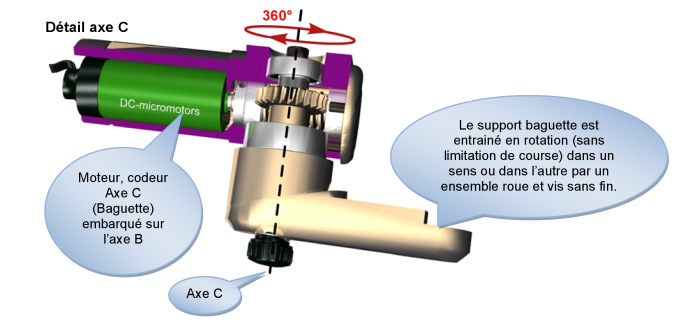
Axe de baguette
On s'intéresse au fonctionnement de l'axe de la baguette (Axe C) permettant d'orienter la baguette.
La mise en mouvement de l'axe de la baguette est réalisée par :
un moteur à courant continu
un réducteur
le support de baguette
Une fois la consigne envoyée, l'axe de la baguette commence à se mettre en mouvement. La rotation générée est mesurée à l'aide d'un codeur incrémental (capteur de position relative) qui envoie une information à la carte électronique. La carte électronique compare l'image de l'angle réel à l'image de l'angle de consigne puis commande le moteur à courant continu par l'intermédiaire d'un hacheur (l'asservissement peut être réalisé en vitesse ou position).
Pour présenter et regrouper l'ensemble des composants intervenant dans l'axe de poignée, on peut utiliser une description par chaînes fonctionnelles (documents partiellement remplis ci-dessous).