Analyse fonctionnelle et structurelle
Le robot Jockey est un robot ayant 3 axes de rotation. L'axe A de l'épaule qui n'est pas piloté. L'axe B gérant la rotation du poignet et enfin l'axe C gérant la rotation de la baguette.
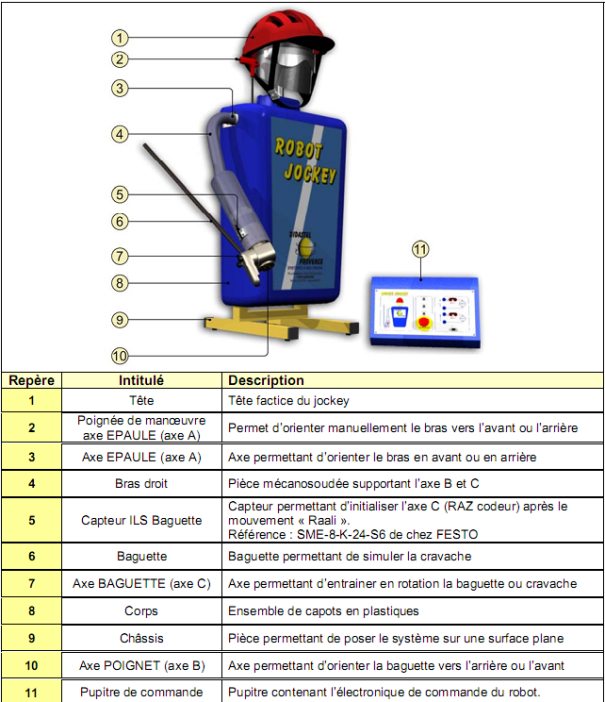
Le système automatisé robot Jockey est constitué :
D'un ordinateur de type PC avec le logiciel de commande, dont la fonction principale est de contrôler le robot tant au niveau de ses déplacements, qu'au niveau de son dialogue avec les périphériques,
D'une carte de commande d'axes qui assure l'ensemble des asservissements à l'intérieur du pupitre de commande avec :
Les amplificateurs de puissance,
Les alimentations à partir du 220 V,
Du robot Jockey