Affichage par schéma-bloc
A partir du menu d'accueil de robot Jockey, cliquer sur ![]()
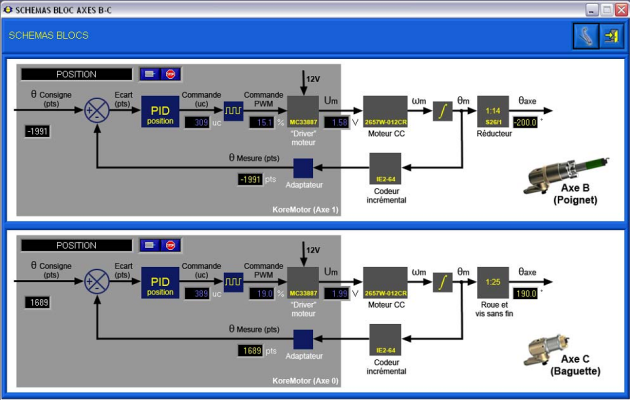
Cette interface vous permet éventuellement de déterminer quelques valeurs de gain, qu'ils convient de valider à l'aide de mesures quand cela est possible.
En cliquant sur ![]() :
:
vous pouvez "stopper l'axe" : commande en boucle ouverte avec 0V en consigne.
vous pouvez "envoyer consigne axe" en positio, vitesse, trapèze, ... via l'interface "KoreMotor".
L'interface "KoreMotor" permet également de piloter et faire des mesures. Consulter la documentation du logiciel à la section 5.1 (p42) pour avoir plus de détails. Cette interface peut être utile pour faire des mesures...