Prise en main du robot Jockey
Attention :
SECURITE : Attention le robot Jockey peut blesser une personne à proximité lors d'un mouvement de Raali : faites bien attention que personne n'est dans la zone de rotation de la baguette.
La description logiciel ci-après est non exhaustive, et vous êtes grandement invité à parcourir la documentation logiciel disponible dans le dossier de travail.
allumer l'ordinateur
désenclencher l'arrêt d'urgence sur le coffret de puissance et appuyer sur l'interrupteur au dos du coffret.
lancer le logiciel : « Robot Jockey »
ôter la baguette si celle-ci est présente, puis initialiser les axes en cliquant sur l'icone

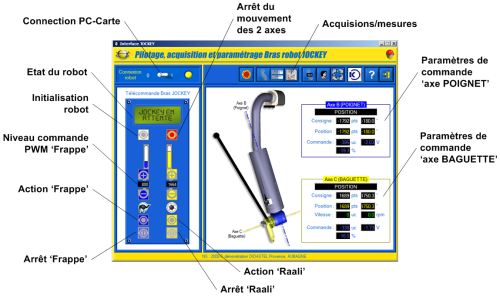
mettre en place la baguette :
Installation
- Dévissez les 2 vis à têtes moletées ;
- Insérez la baguette dans le logement du support
baguette (attention au sens de la baguette qui doit
avoir son bouchon vers le bas).
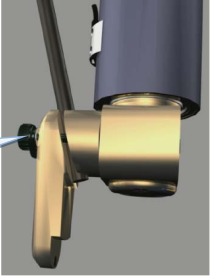
Serrage
- Ajustez la baguette pour ne pas qu'elle dépasse
du support, sinon elle risque d'accrocher le corps
du bras et bloquer la rotation de l'axe du Poignet.
- Resserrez sans forcer les 2 vis.
Le Robot JOCKEY est maintenant prêt à être utilisé.
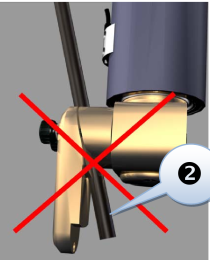
Régler le niveau de la commande PWM (Pulse Wide Modulation) ou MLI (Modulation à Largeur d'Impulsion) en français de commande du driver moteur de frappes à 1500 et tester le mouvement de frappes en les lançant avec l'icône ![]() puis en les arrêtant avec l'icône
puis en les arrêtant avec l'icône ![]() .
.
Vous pouvez stopper les axes en cliquant sur l'icône ![]() (ceci permet de supprimer l'éventuel sifflement dû à l'asservissement permanent en position de l'axe de poignet).
(ceci permet de supprimer l'éventuel sifflement dû à l'asservissement permanent en position de l'axe de poignet).