Réponse en boucle fermée (asservissement en fonctionnement)
Choix de la correction
Pour choisir ce type de commande, il faut cliquer sur « Position – B fermée » dans la colonne de gauche, ce qui a pour effet de faire apparaître les différents choix de correction :
Proportionnel : le correcteur est \(C(p)=K_p\)
Proportionnel et Dérivé (P.D.) : le correcteur est \(C(p)=K_p-8K_dT_ep\)
Proportionnel et Intégral (P.I.) : le correcteur est \(C(p)=K_p+\frac{K_i}{T_e p}\)
Proportionnel, Intégral et Dérivé (P.I.D.) : le correcteur est alors \(C(p)=K_p+\frac{K_i}{T_e p}-8K_dT_ep\)


Les autres commandes permettent des conversions plus ou moins complexes.
Pour lancer la mesure, on choisit la correction souhaitée (ici on choisit la correction proportionnelle, la seule qui sera utilisée dans le cadre de ce TP) et on retrouve une fenêtre de sélection identique à celle obtenue pour la commande en chaîne directe, si ce n'est qu'il est maintenant possible de tracer la consigne du variateur et l'erreur (pour la vitesse, il suffira de demander une dérivation du signal obtenu).
Mesure
Pour démarrer la mesure, cliquer sur l'icône « Lancer la mesure ».
On obtient alors, après un « certain » temps (il faut de nouveau être patient, il y a beaucoup de données à rapatrier !), on obtient alors l'écran de mesure avec :
la courbe de déplacement du chariot en bleu
la consigne de variateur (avec les inévitables saturations) en rouge
l'erreur de position (différence entre la consigne de déplacement et la position réelle du chariot) en orange

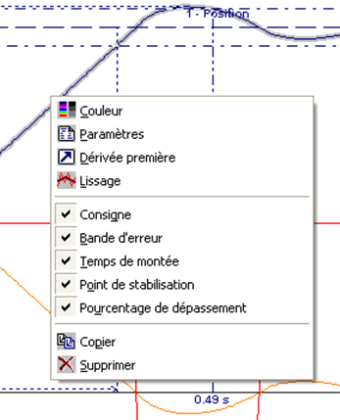
En sélectionnant la courbe avec le bouton droit de la souris, on peut de nouveau réaliser un certain nombre d'opérations sur cette courbe (voir copie ci-contre).