Robot Delta
Mise en situation
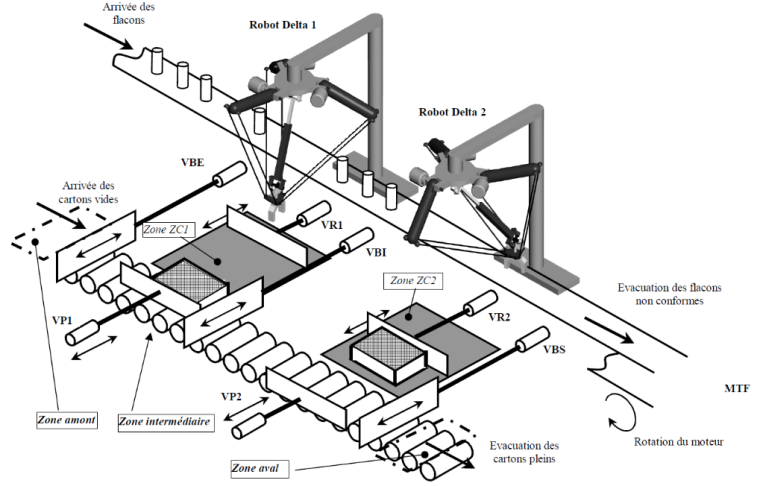
Une usine de fabrication de flacons en verre possède un poste de mise en cartons qui est l'objet de la présente étude.
Nous nous intéressons ici plus particulièrement aux robots Delta dont la description détaillée est fournie ci-dessous.
Données
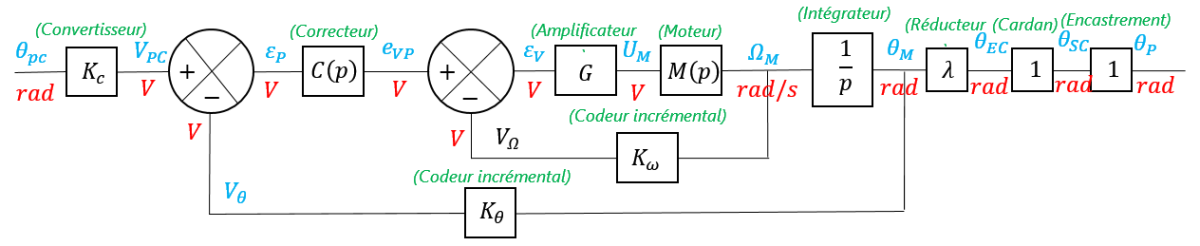
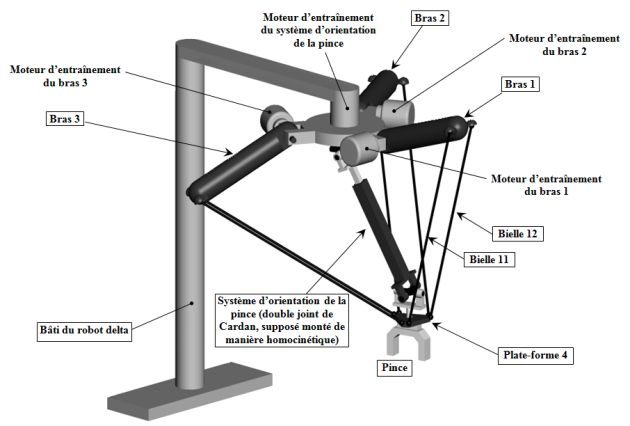
Le servo-entraînement met en rotation un arbre télescopique muni à chacune de ses extrémités d'un joint de Cardan. Le mouvement d'orientation de la pince est indépendant des mouvements de la plate-forme 4. Afin d'assurer un bon positionnement angulaire de la pince P, la commande de sa rotation est asservie de la façon suivante :
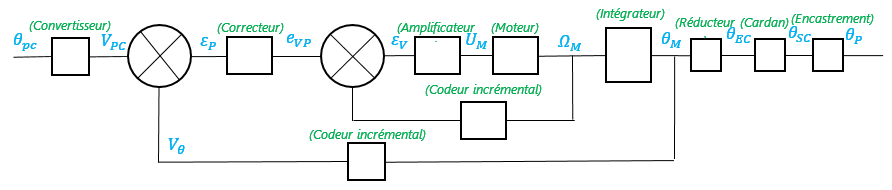
La consigne de position \({{\theta }_{PC}}\), entrée par l'utilisateur grâce à une interface graphique (lors des réglages) ou imposée par la Partie Commande (lors des cycles de travail), est transformée en une tension \({{V}_{PC}}\) grâce à un convertisseur qui sera assimilé à un système de gain pur \({{K}_{C}}\) (en \(V/rad\)).
La vitesse de rotation \({{\omega }_{M}}\) (en \(rad/s\)) et l'angle de rotation \({{\theta }_{M}}\) (en \(rad\)) de l'arbre moteur sont mesurés par un codeur incrémental, monté directement sur l'arbre moteur, qui délivre une information numérique. Celle-ci est alors transformée par une carte de conversion numérique – analogique (C.A.N.) supposée linéaire, en deux tensions \({{V}_{\omega }}\) et \({{V}_{\theta }}\) telles que :
pour la vitesse : \({{V}_{\omega }}={{K}_{\omega }}{{\omega }_{M}}\)
pour la position : \({{V}_{\theta }}={{K}_{\theta }}{{\theta }_{M}}\)
La tension \({{V}_{\theta }}\) (image de la rotation \({{\theta }_{M}}\) du moteur) est soustraite à la tension \({{V}_{PC}}\) pour donner la tension \({{\varepsilon }_{P}}\).
Cette tension \({{\varepsilon }_{P}}\) est modifiée par un correcteur de fonction de transfert \(C\left( p \right)\) pour donner la tension \({{e}_{VP}}\).
La tension \({{V}_{\omega }}\) (image de la vitesse de rotation \({{\omega }_{M}}\) du moteur) est soustraite à la tension \({{e}_{VP}}\) en sortie du correcteur pour donner la tension \({{\varepsilon }_{V}}\).
Cette tension \({{\varepsilon }_{V}}\) est amplifiée par un amplificateur de gain pur \(G\) pour donner la tension d'alimentation du moteur \({{U}_{M}}\). Le moteur tourne alors à la vitesse angulaire \({{\omega }_{M}}\).
La rotation \({{\theta }_{EC}}\) de la pièce d'entrée du double joint de Cardan obtenue à l'aide du réducteur de vitesse fixé sur l'arbre moteur est telle que : \({{\theta }_{EC}}=\lambda {{\theta }_{M}}\)
Le double joint de Cardan est homocinétique et a pour fonction de transfert \(R\left( p \right)~=~1\) (l'entrée est l'angle \({{\theta }_{EC}}\), et la sortie est \({{\theta }_{SC}}={{\theta }_{P}}\) où \({{\theta }_{P}}\) est la rotation de la pince fixée par encastrement sur la pièce de sortie du double joint de Cardan).
Travail demandé
Question
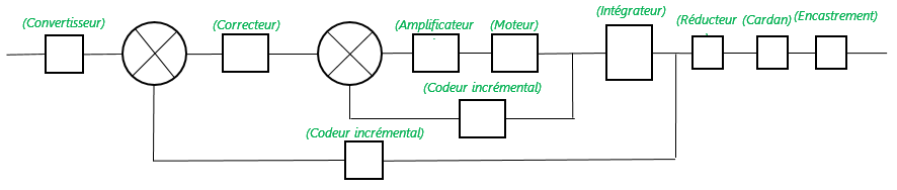
Q1. Compléter le schéma bloc du système en précisant par des mots ce à quoi correspond chaque bloc.

Question
Q2. Préciser les variables sur ce schéma bloc
Question
Q3. Préciser les unités