Asservissement d'une éolienne
L'éolienne étudiée est une éolienne de forte puissance, elle comporte une unité de transformation de puissance supportée par un mât tubulaire en acier permettant l'accès par une échelle interne. Le rotor orienté face au vent comporte trois pales à 120. Les pales sont en matériau composite « fibre de verre » et sont liées à un moyeu.
Le module de calage variable des pales permet, d'une part, d'avoir une vitesse de rotation constante pour des vitesses de vent de 13 à 25 m/s et, d'autre part, de mettre l'éolienne en drapeau pour des vitesses de vent supérieures. Le calage des pales et commandé par un vérin hydraulique alimenté par la pompe. Le module d'orientation est composé d'un moteur hydraulique (alimenté par la pompe) et d'un pignon monté sur l'axe du moteur.
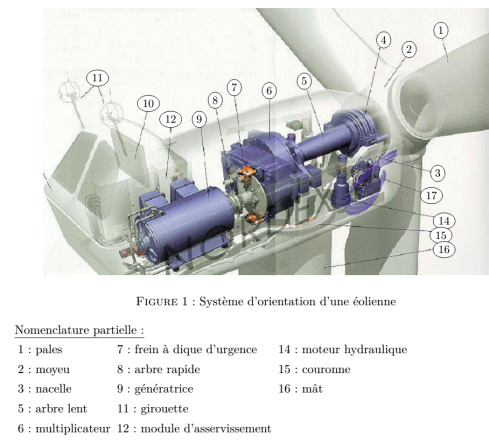
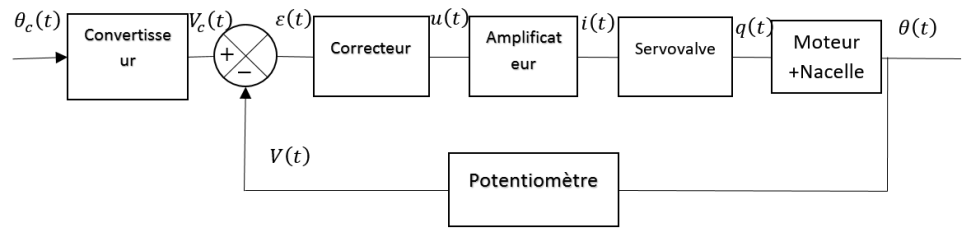
Cette étude concerne l'asservissement de position pour l'orientation de l'éolienne face au vent. Le moteur hydraulique, lié à la nacelle, permet, quand la machine est à l'arrêt, de la positionner face au vent grâce à la girouette. On désire donc asservir la position angulaire \({{\theta }_{{}}}(t)\) de la nacelle à la position angulaire \({{\theta }_{c}}(t)\), de la girouette. La position angulaire \({{\theta }_{c}}(t)\) de la girouette est convertie en une tension \(V_c\), proportionnelle à \({{\theta }_{c}}(t)\), par un convertisseur de gain \(K_c\). La position angulaire \({{\theta }_{{}}}(t)\)de la nacelle est mesurée par un capteur de position (un potentiomètre linéaire circulaire) dont le gain est également \(K_p\), et qui fournit une tension \(V\) proportionnelle à \({{\theta }_{{}}}(t)\). L'écart entre la tension de consigne \(V_c\) et la tension mesurée \(V\) est évalué au niveau d'un soustracteur idéal qui élabore le signal \(\varepsilon (t)\).
Le signal est traité par un correcteur de fonction de transfert \(C\) pour fournir la tension \(U\) aux bornes d'un amplificateur de gain \(K\), permettant d'attaquer avec le courant \(I\) la servovalve de gain \(K_{sv}\).
On appelle \(Q\) le débit d'huile en sortie de la servovalve ; ce débit pilote le moteur hydraulique entraînant la nacelle. La position angulaire \({{\theta }_{{}}}(t)\) de la nacelle se déduit de \(Q\) par la fonction de transfert notée \(H\).
Question
Q1. Mettre en place le schéma bloc fonctionnel de l'asservissement.