Direction assistée Diravi
Notre étude porte sur une direction assistée de voiture, dont la fonction est d'assister le conducteur en permettant à celui-ci de diminuer l'effort à fournir sur le volant lors de manœuvres des roues avant du véhicule.
Mise en situation
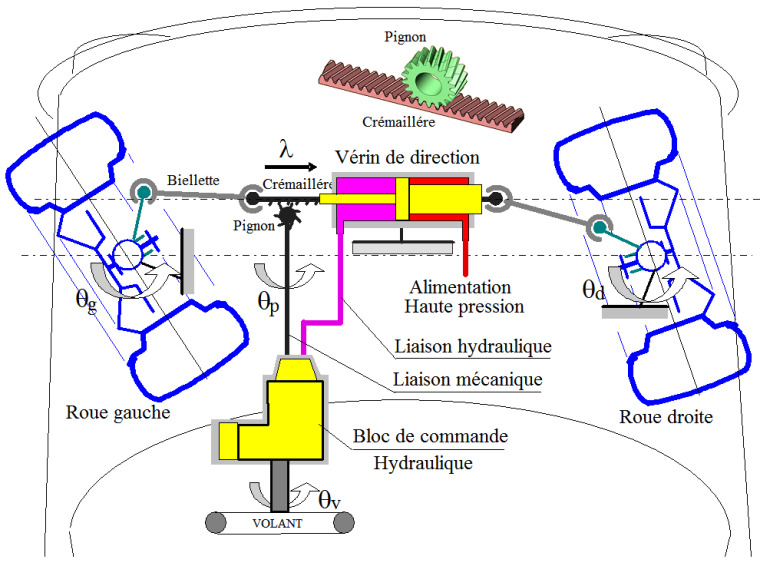
Le schéma ci-dessus présente le principe de fonctionnement de la direction assistée Diravi.
Le conducteur impose un angle de rotation sur le volant \({{\theta }_{v}}\). L'objectif du système est alors de transformer cette rotation du volant en une translation de la crémaillère \(\lambda \) entraînant alors les deux roues en rotation.
Dans un système de direction classique non assistée, le bloc de commande hydraulique n'est pas présent. La rotation du volant entraîne directement la crémaillère par l'intermédiaire du pignon, ce qui induit la rotation des roues. Tout effort au niveau des roues s'opposant au mouvement est donc directement contré par les bras du conducteur agissant sur le volant.
Dans une direction assistée électrique classique, l'action exercée par le conducteur sur le volant est complétée par le moteur, et le couple total est transmis par l'ensemble pignon crémaillère-vers les roues comme dans le cas de la direction non assistée.
La particularité de la direction assistée hydraulique Diravi est de ne pas transmettre directement la rotation du volant et les efforts sur celui-ci aux roues par l'intermédiaire du pignon en contact avec la crémaillère, et donc de ne pas transmettre directement l'effort du conducteur sur les roues, un vérin s'en chargeant. En effet, lorsque le conducteur impose une rotation au volant \({{\theta }_{v}}\), dans un premier temps à une échelle de temps très réduite, l'angle du pignon en contact avec la crémaillère \({{\theta }_{p}}\) n'évolue pas, la crémaillère et les roues restant immobile. Le bloc de commande hydraulique mesure l'écart entre \({{\theta }_{v}}\) et \({{\theta }_{p}}\), qui auraient dû être égaux, par l'intermédiaire d'un système mécanique dans le bloc de commande hydraulique présenté sur la prochaine image. Le système pignon-crémaillère est donc utilisé comme un capteur qui remonte l'information de déplacement de la crémaillère en la transformant en une rotation \({{\theta }_{p}}\). On aurait pu imaginer que l'ensemble pignon-crémaillère ne soit pas présent, et qu'un capteur mesure directement la translation de la barre à laquelle est fixée la crémaillère, mais nous verrons ensuite l'intérêt sécuritaire de garder cet ensemble. L'écart angulaire entre \({{\theta }_{v}}\) et \({{\theta }_{p}}\) se traduit alors par la mise en place d'une circulation de fluide sous pression dans la liaison hydraulique, mettant en mouvement la crémaillère par l'intermédiaire du vérin de direction. Cette translation induit une rotation du pignon en contact avec la crémaillère qui fait diminuer l'écart entre \({{\theta }_{v}}\) et \({{\theta }_{p}}\), l'objectif étant de l'annuler.
On voit donc que ce système :
Ne met pas en relation l'effort du conducteur avec les roues. On peut donc imaginer qu'il ne devrait y avoir aucun effort à fournir sur le volant, le vérin étant là pour mouvoir les roues. Il est donc ajouté un système mécanique non étudié ici qui va par lui-même rigidifier la direction afin d'assurer la sécurité du conducteur en réduisant le risque de mouvements intempestifs du volant
Ne semble pas sécuritaire car on peut se demander ce qu'il se passe en cas de panne. En réalité, si une panne survient, le bloc hydraulique permet de transmettre mécaniquement la rotation et les efforts du volant aux roues par l'intermédiaire du pignon utilisé cette fois ci dans le » sens classique », ce qui revient à une direction assistée classique.
Ci-dessous, vous trouverez la vue 3D du bloc de commande.
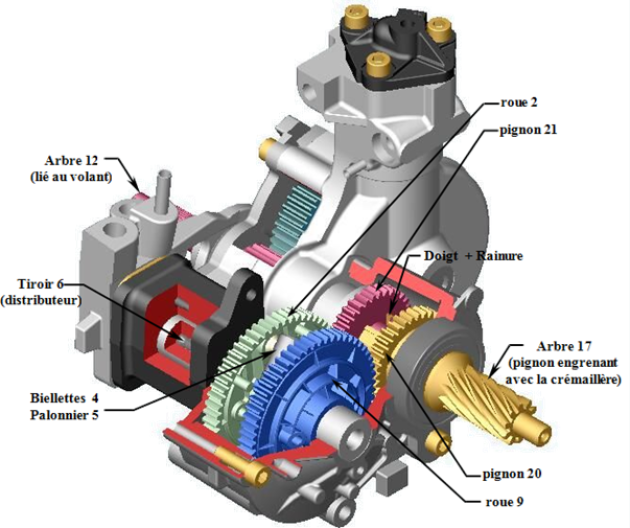
La rotation du volant, lié à l'arbre 12 fait tourner le pignon 21 qui entraîne la roue 2. L'arbre 17 et donc le pignon 20 et la roue 9 sont fixes, car le vérin hydraulique n'est pas encore alimenté. Le décalage angulaire entre les roues 2 et 9 provoque l'inclinaison des biellettes qui commandent la translation du tiroir 6 du distributeur par le biais du palonnier 5. Le vérin hydraulique est alors alimenté en énergie.
Le déplacement de la crémaillère qui entraîne le train avant entraîne en rotation l'arbre 17, le pignon 20 et de la roue 9, qui finit par rattraper la roue 2, ce qui commande le retour du tiroir 6. Le vérin hydraulique s'immobilise, la crémaillère est de nouveau bloquée hydrauliquement.
Données et Travail demandé
Données
Voici quelques données utiles :
On nomme \({{\theta }_{v}}\) la rotation du volant, de l'arbre 12 et du pignon 21 aussi notée \({{\theta }_{21}}\)
On nomme \({{\theta }_{p}}\) la rotation du pignon 20 et de l'arbre 17 aussi notée \({{\theta }_{20}}\)
On nomme \({{\theta }_{v}}^{'}\) la rotation de la roue 2 entraînée par le pignon 21 aussi notée \({{\theta }_{2}}\)
On nomme \({{\theta }_{p}}^{'}\) la rotation de la roue 9 entraînée par le pignon 20 aussi notée \({{\theta }_{9}}\)
Les engrenages (assemblage de deux roues dentées) transforment une rotation en une autre. On représentera le rapport \(\frac{{{\theta }_{j}}}{{{\theta }_{i}}}={{k}_{j/i}}\)
Le système mécanique associé aux roues 9-2 et aux biellettes permet de transformer la différence de rotation \(\left( {{\theta }_{v}}^{'}-{{\theta }_{p}}^{'} \right)\) en translation du tiroir \(X\) avec un facteur de proportionnalité \(k~\)tel que \(X=k\left( {{\theta }_{v}}^{'}-{{\theta }_{p}}^{'} \right)\)
La relation de transformation de mouvement entre la translation de la crémaillère \(\lambda \) et la rotation de l'arbre 17 est un facteur de multiplication \({{k}_{pc}}\)
On notera \({{\theta }_{r}}\) la rotation des roues et \(F\left( p \right)\) la fonction de transfert associée à la transformation de mouvement mécanique entre la translation de la crémaillère \(\lambda \) et l'orientation de roues \({{\theta }_{r}}\).
On notera \(\varepsilon \) l'écart dans le système asservi
On notera \(X\) la position du tiroir et \(Q\) le débit de fluide, dont la relation de proportionnalité est décrite par le coefficient \({{k}_{xq}}\)
La fonction de transfert du vérin hydraulique sera notée \(G\left( p \right)\)
Travail demandé
Question
Q1. Réaliser le schéma bloc du système en précisant par des mots ce à quoi correspond chaque bloc.

Question
Q2. Préciser les fonctions de transfert dans les blocs

Question
Q3. Préciser les variables sur ce schéma bloc

Question
Q4. Préciser les unités
