Hacheurs
Principe
Le hacheur est le préactionneur standard des moteurs à courant continu, il permet à partir d'une source de tension continue, d'alimenter le moteur avec une tension variable. L’énergie de l'alimentation est une batterie de tension continue \(U_{alim}\) on désire alimenter le moteur avec une tension continue \( U_{mot}\) tel que \(-U_{alim}<U_{mot}<U_{alim}\) en fonction de la valeur de commande provenant de la chaîne d'information.
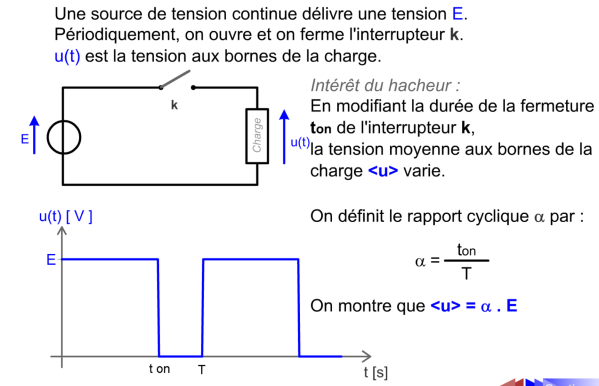
Si le temps \(T\) est très petit devant le temps caractéristique du moteur du point de vue de ce dernier la tension est égale \(<u>\).
Le principe de 'hachage ' peut être très différent suivant les parte commande des systèmes, delà va de circuit électrique, à des commandes numérique...
Simulation : Animation Flash sur les Hacheurs
Pour lire les animations en flash veuillez télécharger le lecteur suivant
Hacheur sur Arduino
La partie bleu permet de connecter l'alimentation de puissance externe le connecteur de gauche est relié à la carte de pilotage et le connecteur de droite est relié au moteur électrique pour assurer son alimentation avec 2 fils, les autres fils permettent d'alimenter capteurs magnétiques et de récupérer le signal qu'ils renvoient.
Pour faire varier la tension aux bornes du moteur, on pilote en % du temps de cycle vers le hacheur. Il faut également indiquer dans quel sens doit tourner le moteur (information binaire 0 ou 1). Si le hacheur reçoit un mot numérique égal à 0, il enverra 0V au moteur, s'il reçoit le mot maximal il enverra la tension maximale qu'il reçoit de par l'alimentation.

Hacheur du volant DMS
Le hacheur utilisé sur le volant est commandé en 10 bits (-/+1024) pour une tension de de -/+ 24V.