Avec le logiciel Falcon_Piloter (pour étude d'asservissement)
Ce logiciel permet de piloter l'angle de rotation d'un bras avec ou sans asservissement, et avec différents types de correcteur.
Ceci permet de réaliser une étude de l'asservissement en position.
Branchement
Brancher le robot haptique instrumenté comme sur l'image ci-dessous.
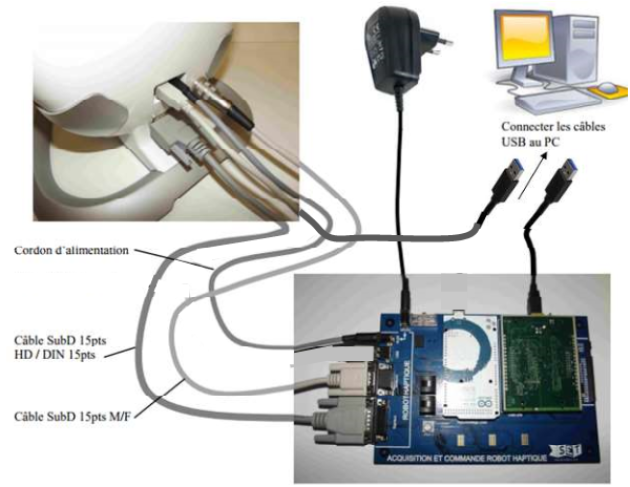
Attention :
Ne pas confondre le cordon d'alimentation (qui relie le robot à la carte) avec le bloc secteur d'alimentation (qui relie une prise 220V à la carte) ! !
2 cordons USB sont à brancher, et aucun sur la carte Arduino.
Lancement du logiciel Falcon_piloter et initialisation des codeurs
Lancer le logiciel Falcon_piloter.
Ce dernier permet de piloter l'angle de rotation d'un bras avec ou sans asservissement, et avec différents types de correcteur.
Effectuer les opérations demandées à l'écran (déplacement à la main de l'effecteur jusqu'à ses butées extrêmes). Ceci permet d'initialiser les codeurs. Lorsque cette manipulation est effectuée, le robot haptique est de couleur bleu au lieu de rouge.
Placement du robot en position de référence (à faire avant chaque essai)
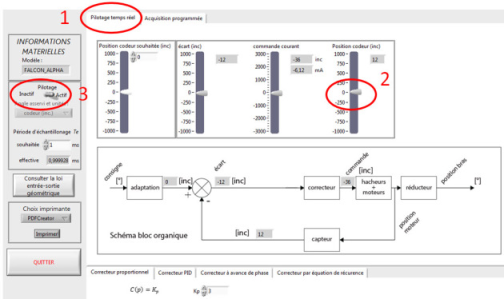
Selon l'image ci-dessous :
1. Cliquer sur l'onglet Pilotage temps réel
2. Positionner le codeur à 0 inc
3. Basculer l'interrupteur sur actif
Choix de la structure à piloter
Sur ce système, il est possible de piloter 2 structures (AVEC ou SANS asservissement) :
Essai possible | Structure à piloter | Entrée à renseigner |
|---|---|---|
Essai en boucle fermée (BF) | Avec asservissement en position (prise en compte du retour capteur, et de la correction apportée par l'unité de commande) | Image de la consigne de position en inc à l'entrée de l'unité de commande (devant le comparateur) \(1~inc=\frac{1}{27,12^{\circ}}\) |
Essai en boucle ouverte (BO) | Sans asservissement (pas de retour capteur envoyé à l'unité de commande) | Entrée numérique en inc à l'entrée du hacheur |
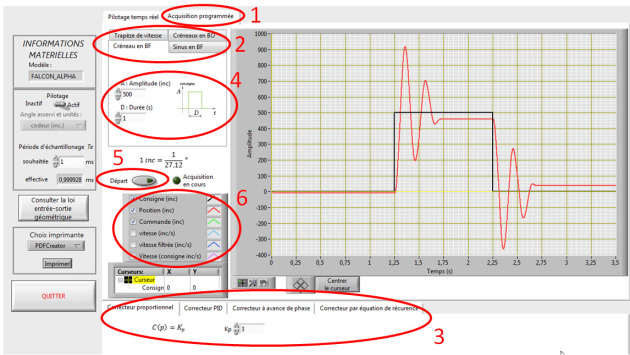
Selon l'image ci-dessus :
Dans la zone 1, sélectionner l'onglet Acquisition programmée.
Dans la zone 2, choisir la structure à piloter.
Définition du correcteur
La zone "paramètres du correcteur" (zone 3 dans la fenêtre ci-dessus) permet de définir le correcteur de position.
Choisir le type puis les paramètres du correcteur sélectionné. Ces choix doivent être renseignés selon les les valeurs données dans le TP.
Définition de l'entrée
Voir tableau ci-dessus afin de connaître la grandeur en entrée de l'essai.
La zone 4 de la fenêtre ci-dessus permet de choisir la valeur de l'entrée .
Les amplitudes minimales et maximales des entrées sont limitées pour éviter d'abîmer le système :
en BF : l'image de la consigne de position est comprise entre -1000 et 1000 inc (soit une consigne comprise entre -37° et 37°) ;
en BO : l'entrée du hacheur est comprise entre -1300 et 1300 inc.
Essai et affichage des résultats
La zone 5 de la fenêtre ci-dessus permet de lancer l'essai.
La zone 6 de la fenêtre ci-dessus permet de sélectionner les grandeurs à afficher.
Exporter les valeurs d'un essai
Cliquer droit sur le graphique et sélectionner "exporter les données vers le presse papier".
Ouvrir un nouveau fichier du logiciel "pyzo" (ou si besoin un fichier du logiciel "bloc-notes"), et coller ces données.
Attention :
Ne pas oublier de replacer l'effecteur à la main à une position de \(0^{\circ}=0~inc\) avant chaque essai. Pour cela, retourner dans l'onglet pilotage temps réel.