Avec le logiciel Falcon_Acquérir (pour étude de la loi E/S)
Ce logiciel permet d'acquérir la position de l'effecteur suivant la direction horizontale (avant-arrière) en fonction de l'angle de rotation d'un bras.
Ceci permet d'obtenir la loi entrée-sortie géométrique d'un transformateur de mouvement bielles/bras (bras et parallélogramme).
Branchement
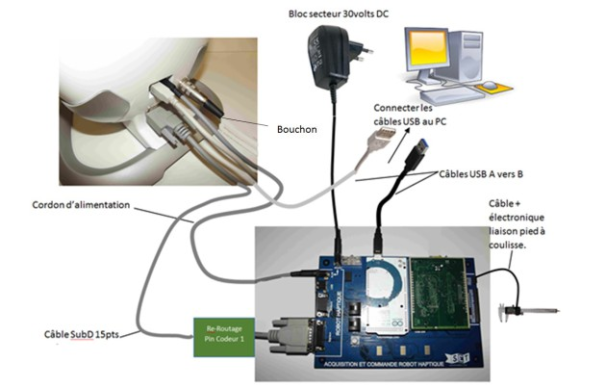
Attention :
Ne pas confondre le cordon d'alimentation (qui relie le robot à la carte) avec le bloc secteur d'alimentation (qui relie une prise 220V à la carte) ! ! ! !
Lancement du logiciel Falcon_acquérir et initialisation des codeurs
Lancer le logiciel Falcon_acquérir. Ce dernier permet d'acquérir la position de l'effecteur suivant la direction horizontale (avant-arrière) en fonction de l'angle de rotation d'un bras.
Effectuer les opérations demandées à l'écran (déplacement à la main de l'effecteur jusqu'à ces butées extrêmes). Ceci permet d'initialiser les codeurs. Lorsque cette manipulation est effectuée, le robot haptique est de couleur bleu au lieu de rouge.
Mesure
Déplacer à la main l'effecteur, dans un mouvement d'aller-retour, pour couvrir tout l'intervalle de déplacement.
Attention : Recalage et export des mesures
Lors d'un recalage ou d'un export de mesures (voir ci-dessous), le PC mouline et semble planter. Or, ce n'est pas le cas. Il faut juste attendre 1 ou 2 min, car ces différentes tâches manipulent beaucoup de points de mesure...
Recaler Z et alpha si besoin, afin que la position initiale corresponde au paramétrage donné dans le sujet de TP.
Pour exporter les valeurs acquises :
- cliquer droit sur le graphe, puis exporter vers le presse-papier ;
- coller ces valeurs dans un fichier du logiciel Pyzo.