Schéma-bloc
On propose la modélisation de l'axe de lacet sous la forme du schéma-bloc suivant :
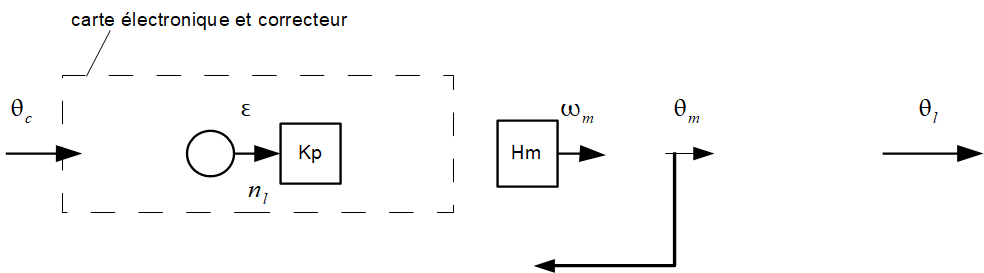
Avec :
\(\theta_c\) la consigne (en °)
\(n_c\) le nombre d'incréments image de la consigne (en pts)
\(n_l\) le nombre d'incréments de l'axe de moteur (en pts)
\(\epsilon\) l'écart (exprimé sur la différence d'incréments consigne/réel) (en pts)
%CNA la tension de commande du variateur (en Volt)
Uc le courant de consigne pour le moteur (en V)
\(\omega_m\) la vitesse de rotation de l'axe du moteur (en rad/s)
\(\theta_m\) l'angle de rotation de l'axe du moteur (en °)
\(\theta_r\) l'angle de l'axe de sortie du réducteur (en °)
\(\theta_l\) l'angle de l'axe du lacet (en °)
Il est nécessaire d'analyser les caractéristiques de chaque constituant pour déterminer les différents blocs. Plusieurs expériences permettent également de vérifier les résultats déterminés théoriquement (cf. partie Manipulations et Descriptions des composants)
Attention :
On donne \(K_p\frac{K}{1048576} V/inc\) avec K le gain proportionnel rentré dans le logiciel lors d'une expérience en boucle fermée.