Présentation du système

Le robot Ericc 3 est un robot ayant 5 axes de rotation. Ce robot anthropomorphe est utilisé en entreprise pour de nombreuses tâches différentes : collage, soudage, peinture, manutention de pièces...
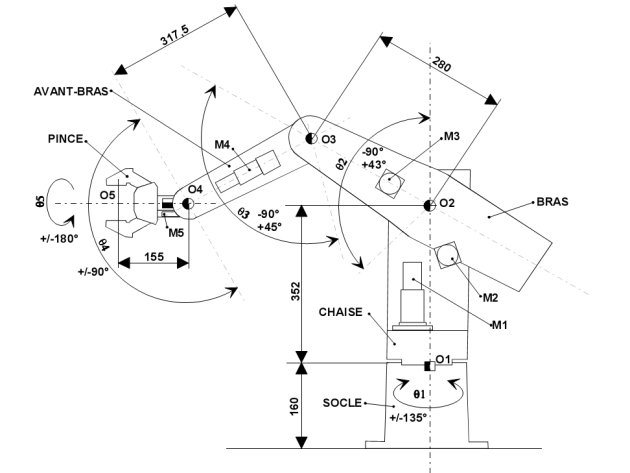
Le bras porteur est composé de plusieurs parties :
Le socle
La chaise
Le bras
L'avant-bras
Le poignet
La pince
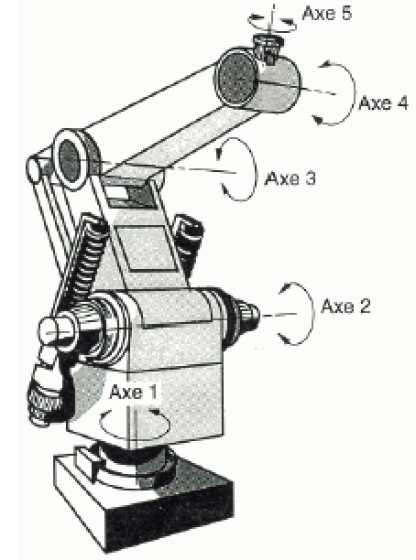
La figure ci-contre, relative à un autre robot, illustre les positions des axes de rotation.
La définition des axes est la suivante :
Axe 1 : axe de lacet, associé au paramètre θ1
Axe 2 : axe d'épaule, associé au paramètre θ2
Axe 3 : axe de coude, associé au paramètre θ3
Axe 4 : axe de poignet, associé au paramètre θ4
Axe 5 : axe de pince, associé au paramètre θ5
Le système automatisé robot est constitué :
D'un ordinateur de type PC avec le logiciel de commande, dont la fonction principale est de contrôler le robot tant au niveau de ses déplacements, qu'au niveau de son dialogue avec les périphériques,
D'une carte de commande d'axes qui assure l'ensemble des asservissements. Le contrôle des axes est géré de manière autonome par le processeur local indépendamment du calculateur hôte,
D'un coffret de puissance comportant notamment :
Les amplificateurs de puissance,
Les alimentations à partir du 220 V,
Les contacteurs de commande des freins,
L'électrovanne de commande de la pince pneumatique.
D'un robot 5 axes.
