Détection du fil
Principe
Deux bobines, placées de part et d'autre et perpendiculairement au fil directeur, captent le champ magnétique créé par un courant à 70 kHz, circulant dans celui-ci. Les deux signaux sont transformés en deux tensions proportionnelles à la distance entre les bobines et le fil. Ces deux valeurs analogiques sont alors converties en valeurs numériques et sont utilisées dans l'algorithme d'asservissement de la direction.
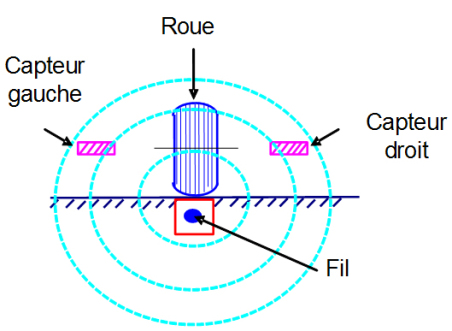
fil émettant un rayonnement
2 capteurs captent ce rayonnement
l'orientation de la roue est asservie aux signaux captés (la roue s'oriente pour rejoindre le fil).
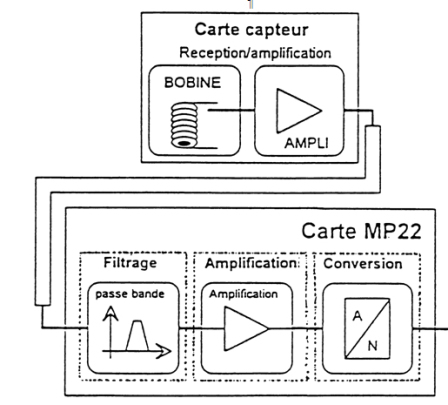
Réception et amplification
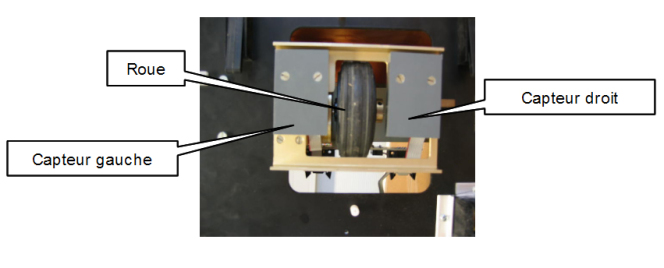
Deux bobines réalisées par un enroulement de fil émaillé sur un noyau de ferrite, placées de part et d'autre de la roue, captent le champ magnétique émis par le fil directeur. Ces signaux sont amplifiés immédiatement aux bornes de la bobine pour limiter leur parasitage pendant leur transfert entre la partie capteur et la partie traitement sur la carte MP22.
Filtrage
Un filtre passe-bande du quatrième ordre permet de séparer et amplifier le fondamental du signal émis en vue de son traitement.
Amplification et détection
Un dernier étage d'amplification permet de régler le niveau du signal reçu qui est alors transformé par une détection de crête en une tension analogique image de la distance entre la bobine de détection et le fil.
Ce signal est alors converti en une valeur numérique qui sera utilisé pour l'asservissement de la position du chariot par rapport au fil.