Accéléromètre
Principe
Le principe de tous les accéléromètres est basé sur la loi fondamentale de la dynamique . Plus précisément, il consiste en l'égalité entre la force d'inertie de la masse sismique du capteur et une force de rappel appliquée à cette masse.
Ce principe de base peut être décliné par un système masse/ressort ou un système pendulaire. Un accéléromètre est toujours composé d'une masse sismique qui lorsqu'elle est soumise à une accélération va se déplacer. Un élément sensible utilisant des technologies très différentes suivant les cas permet de mesurer ce déplacement et d'en déduire l'accélération galiléenne à laquelle est soumis le capteur.
On distingue deux grandes familles d'accéléromètres : les accéléromètres non asservis et les accéléromètres à asservissement.

Accéléromètres non asservis
Sur les capteurs de type non asservis (boucle ouverte), l'accélération est mesurée par son image « directe » : le déplacement de la masse sismique (masse d'effort ou encore masse d'épreuve) du capteur pour atteindre l'égalité entre la force de rappel et sa force d'inertie.
Il existe un grand nombre d'accéléromètres non asservis différents :
à détection piézoélectrique
à détection piézorésistive
à jauge de contrainte/extensométrie (proche du type piézorésistif, dans son principe)
à détection capacitive
à détection inductive (ou réluctance variable)
à détection optique
à poutre vibrante
à ondes de surface

Accéléromètres à asservissement
Pour les accéléromètres à asservissement, l'accélération est mesurée à la sortie d'une boucle à contre-réaction (asservissement) comportant un correcteur. Un capteur à détection de déplacement (type non asservis) permet la mesure de l'accélération immédiate. Elle est la valeur d'entrée de notre boucle d'asservissement. En sortie de cette boucle, l'accélération est obtenue par la lecture de l'énergie nécessaire à la force de rappel permettant le retour de la masse sismique à sa position initiale.
Dans les centrales inertielles, pour une application en guidage, utilisé généralement en aéronautique ou en astronautique, ce type de technologie est généralement favorisé. En effet, les mobiles ont une certaine masse et leur centre de gravité subit des vibrations de fréquence relativement faible, de l'ordre de 0 à 10Hz. Cela permet donc l'utilisation de capteurs à asservissement.
Ceux-ci sont classés en fonction de leur force de rappel, qui peut être de type électromagnétique ou électrostatique. Ou bien en fonction de leur type de détection, qui peut être capacitive, inductive ou optique.
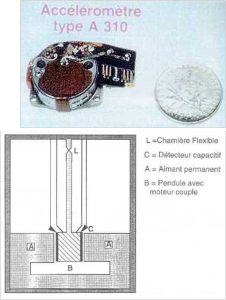
Le type d'accéléromètre le plus utilisé est l'accéléromètre pendulaire. Il est est constitué d'un pendule (B) suspendu par une lame flexible (L) afin de ne subir que le minimum de contraintes. Le point d'équilibre du pendule est obtenu grâce à un aimant permanent (A). Lorsque ce système est soumis à une accélération suivant son axe sensible (axe horizontal sur le schéma), il se déplace. Tout déplacement est mesuré par un détecteur (C). Le retour du pendule dans sa position d'équilibre est assuré par un moteur couple porté par le pendule lui même.
Les applications
Les applications de ce capteur sont très diverses :
la mesure de vitesse (par intégration) ;
la mesure de déplacement (par double intégration) ;
le diagnostic de machine (par analyse vibratoire) ;
la détection de défaut dans les matériaux (en mesurant la propagation d'une vibration à travers les matériaux).
Elles sont généralement classées en trois grandes catégories :
Les chocs ;
Les chocs sont des accélérations de très forte amplitude. Par exemple, un accéléromètre qui tombe d'une hauteur de 20 cm sur une tôle d'acier de 5 cm d'épaisseur sera soumis à une accélération de 8 000 g lors de l'impact, et sur un cahier de 50 pages d'épaisseur, il sera soumis à une accélération de 90 g. Ce sont des accélérations très brèves et donc qui nécessitent un capteur de bande passante allant généralement de 0 à 100 kHz. La précision requise pour ces mesures est de l'ordre de 1 % de l'échelle de mesure du capteur. Les capteurs couramment associés à ce genre d'application sont des accéléromètres à déplacement non asservis, et plus précisément :
à détection piézoélectrique
à détection piézorésistive
à détection capacitive (seulement pour les coussins gonflable de sécurité)
Exemples : Déclenchement des coussins de sécurité dans les voitures, crash-tests, pyrotechnie
L'accélération vibratoire ;
Les accélérations vibratoires sont considérées comme des accélérations de niveau moyen (généralement une centaine de g). Elles nécessitent un capteur de bande de passante allant jusqu'à 10 kHz et de précision de l'ordre de 1 % de l'échelle de mesure du capteur.
Les accéléromètres utilisés, de type non-asservis, sont :
à détection piézoélectrique
à détection piézorésistive ou jauge d'extensiomètrie
à détection inductive (ou réluctance variable)
Exemples : Le contrôle vibratoire pour la R&D, le contrôle industriel
L'accélération de mobiles.
Les accélérations de mobiles sont de faible niveau. Par exemple, l'accélération maximum retenue pour le "Rafale" est de 9 g. Ces accélérations n'excèdent pas quelques dizaines de hertz. En revanche, la précision requise peut être importante. Elle varie de 0,01 % à 2 % de l'échelle de mesure du capteur.
Les accéléromètres utilisés sont :
des capteurs d'accélération non asservis (jauges, capacités, induction, optique, potentiomètre) ;
des capteurs d'accélération asservis.
Exemples : Les stations inertielles des avions, l'aide à détermination dynamique de la position d'un train sur une ligne