Leçon : Algèbre linéaire pour la data science¶
L'algèbre linéaire pour la data science¶
L'algèbre linéaire est une branche des mathématiques qui étudie les espaces vectoriels et les transformations qu'on peut leur appliquer
Pratiquement, l'algèbre linéaire en data science nous est utile pour certains concepts comme:
- encoder tout type de données en une représentation numérique efficace pour les calculs
- faire des calculs sur des vecteurs, matrices, et plus généralement des tenseurs
- calculer des décompositons de matrices comme les valeurs propres et vecteurs propres
- calculer des nouveaux espaces de représentation pour notre data set (par rapport à l'espace de représentation de départ)
- transformer des systèmes d'équations en équations vectorielles
- ...
Notion d'espace vectoriel¶
Définition résumée¶
Basiquement, il s'agit d'un ensemble muni de deux lois de compositions (additive et multiplicative), lois permettent de réaliser des opérations sur les éléments de cet ensemble (et dont le résultat donne nécéssairement des éléments appartenant à cet ensemble).
(Attention : j'ai passé sous silence certaines propriétés supplémentaires nécessaires pour définir définir rigoureusement les espaces vectoriels)
Représentation graphique¶
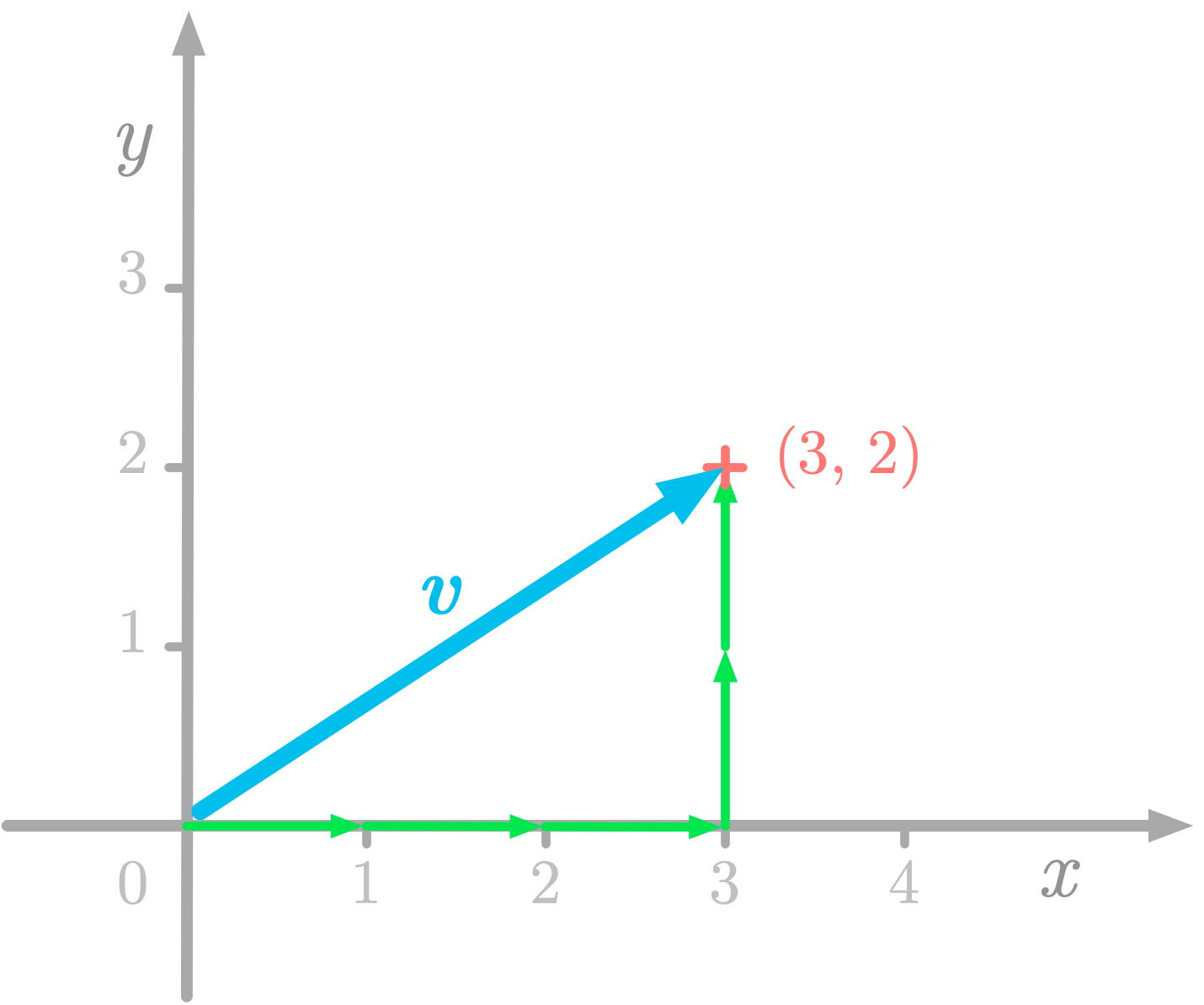
Les éléments d'un espace vectoriels sont des vecteurs, dont chacun peut se décomposer comme une combinaison linéaire de vecteurs de base, comme dans ce repère orthonormé (une base de vecteurs orthogonaux):
 D'après Hadrien Jean
D'après Hadrien Jean
Dans cet exemple, on a: $$v = 3i + 2j$$
Notion de vecteurs¶
Intuition¶
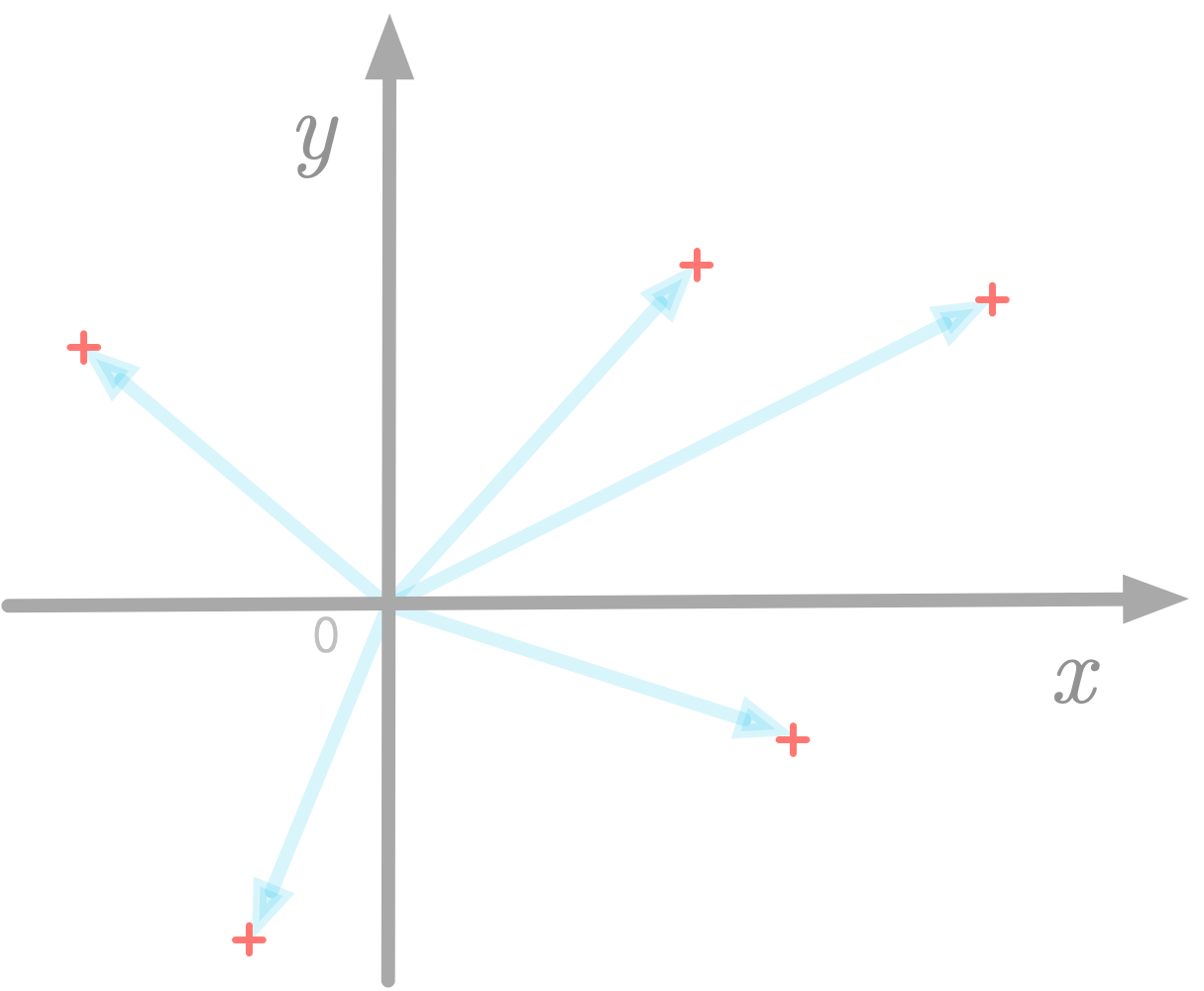
Une manière simple de concevoir les vecteurs est une "flèche" donnant les coordonnées d'un point dans un sytème de coordonnées, souvent un repère
Dans ce syteme de coordonnée, chaque point peut être représenté par un vecteur, comme ici dans un espace vectoriel à 2-dimensions:
 D'après Hadrien Jean
D'après Hadrien Jean
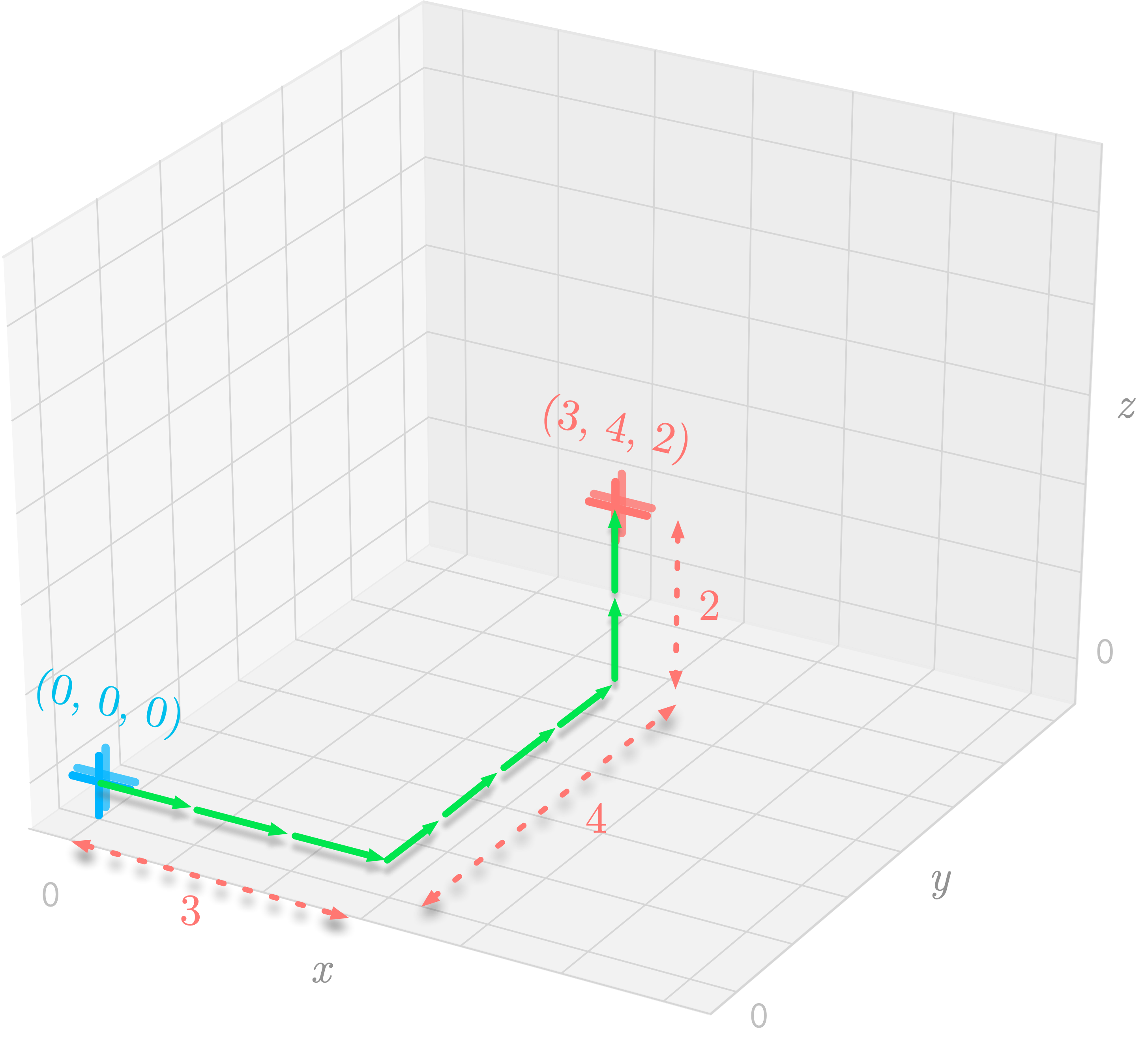
... ou encore à dans un espace vectoriel à 3 dimensions:
 D'après Hadrien Jean
D'après Hadrien Jean
La notion de base et de vecteurs de base¶
Mathématiquement, un vecteur est un point dans un espace vectoriel et peut s'écrire comme une combinaison de vecteur de base. L'ensemble de ces vecteurs, associé à un point d'origine, forme un repère
En algèbre linéaire, chaque vecteur ou point, se décompose comme une combinaison linéaire de vecteurs de base, par exemple :
Ecriture mathématique et informatique¶
En data science, un vecteur est utilisé pour encoder un objet sous forme de valeurs numériques. Très souvent, il sert à représenter les valeurs numériques d'un data set comme une collection de vecteurs.
Vecteur ligne¶
un vecteur ligne, représente un échantillon de données, dans laquelle chaque composante correspond à la même observation de différentes variable
v = np.array([3,4,5])
v
array([3, 4, 5])
Vecteur colonne¶
un vecteur colonne, représentant une variable ou feature, dans laquelle chaque composante correspond à une observation de cette variable.
v = np.array([3,4,2])
v.reshape(3,1)
array([[3],
[4],
[2]])
Généralisation à n dimensions¶
Plus généralement, les vecteurs peuvent avoir $n$ composantes lorsqu'ils représentent des points dans un espace a $n$ dimensions, par exemple des nombres réels $\mathbb{R}^n$
C'est une représentation efficace pour les vecteurs en géométrie euclidienne, mais on peut généraliser ce concept à différents objets : on peut construire des vecteurs représentant des mots, des fonctions mathématiques, ...
Opérations sur les vecteurs¶
Multiplication par un scalaire k¶
Si $v = \begin{bmatrix} 3 \\ 2\end{bmatrix}$ alors $kv = \begin{bmatrix} k*3 \\ k*2\end{bmatrix}$
v = np.array([3,2])
v
array([3, 2])
5*v
array([15, 10])
Produit scalaire (dot product)¶
Il multiplie deux vecteurs pour donner un scalaire, suivant la formule:
u = np.array([3,2,5])
v = np.array([7,1,3])
np.dot(u,v)
38
Norme d'un vecteur¶
La norme d'un vecteur est un scalaire, résultat de son produit scalaire par lui même. Par exemple la norme euclidienne, $L_2$ : $${\parallel u \parallel}_2^2 = u.u$$
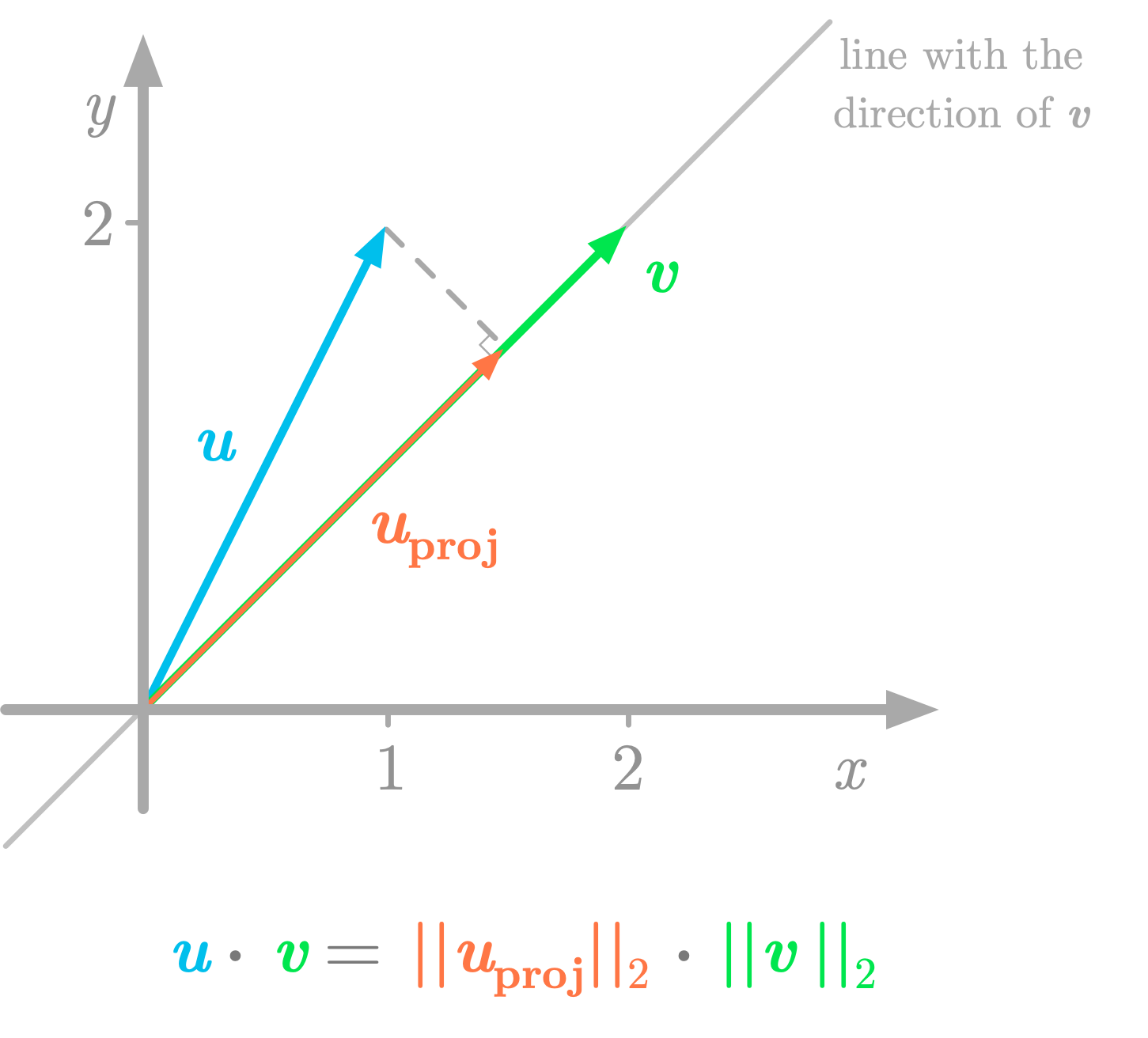
Interprétation géométrique¶
La multiplication de deux vecteurs $u = \begin{bmatrix} 1 \\ 2\end{bmatrix}$ et $v = \begin{bmatrix} 2 \\ 2\end{bmatrix}$ s'interpète comme la multiplication vectorielle de la norme de v par celle de la projection de u sur v:
 D'après Hadrien Jean
D'après Hadrien Jean
A ne pas confondre avec le produit vectoriel (vector multiplication)¶
Les matrices et tenseurs¶
Définition résumée¶
En data science, on peut voir une matrice comme une structure de données sous forme de tableau. On représentera souvent ces deux dimensions comme :
- les observations (en ligne)
- les variables (en colonne)
Par exemple, on pourrait écrire une matrice de données $X$ de dimension $(n,p)$ :
Les matrices : des cas particuliers de tenseurs¶
Plus généralement, les matrices sont des cas particuliers d'objets mathématiques appelés les tenseurs:
- Un scalaire est un tenseur d'ordre 0
- Un vecteur un tenseur d'ordre 1
- Une matrice un tenseur d'ordre 2
- ...
En data science, les matrices nous seront particulièrement utiles pour représenter des transformations (en particulier celle linéaire) et également écrire des systèmes d'équation de manières factorisée
représentation avec numpy¶
On peut facilement utiliser toutes les propriétés des matrices avec numpy :
X = np.array([[2.1, 7.9, 8.4],
[3.0, 4.5, 2.3],
[12.2, 6.6, 8.9],
[1.8, 1.3, 8.2]])
Produit de matrices¶
Exemple de calcul¶
Il s'agit d'une opération très courante en algèbre linéaire. La multiplication d'une matrice $A$ par $B$ donne une matrice, suivant le schéma suivant :
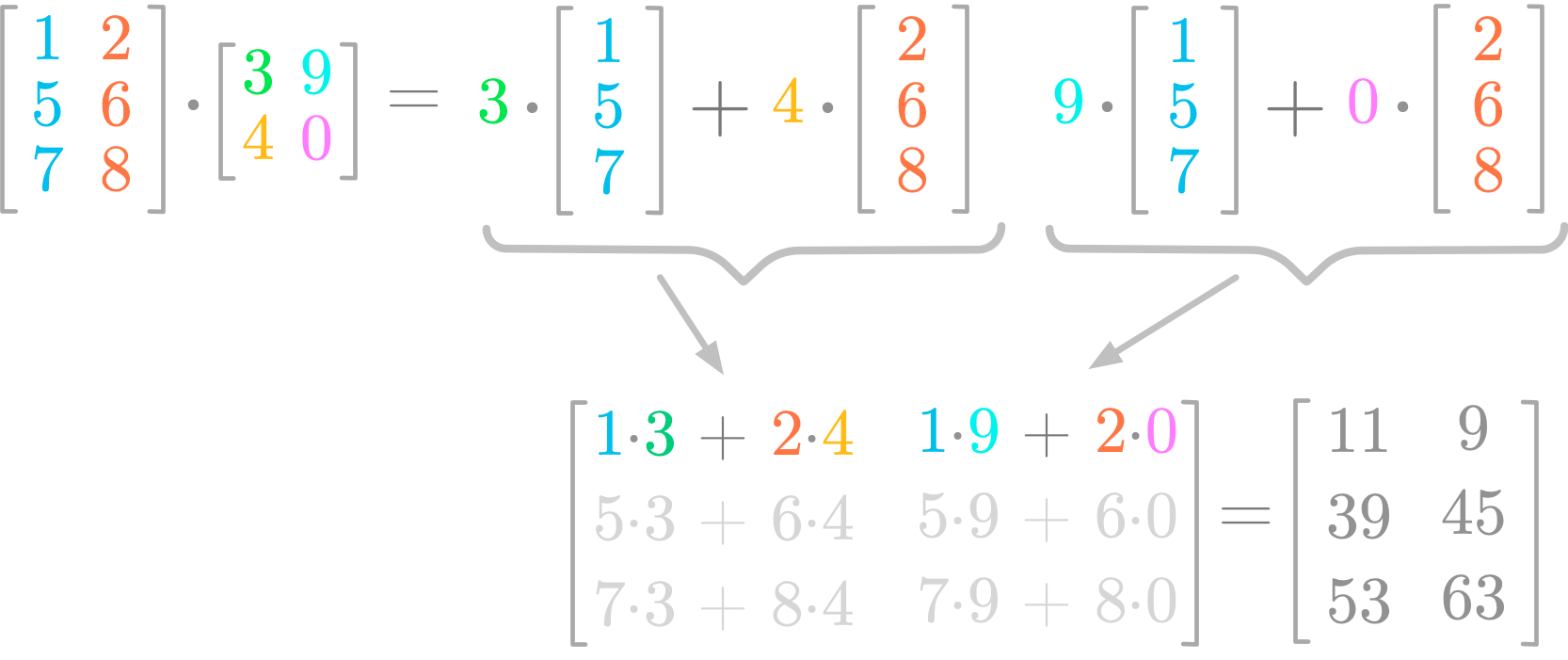 D'après Hadrien Jean
D'après Hadrien Jean
Avec numpy¶
A = np.array([
[1, 2],
[5, 6],
[7, 8],
])
B = np.array([
[3, 9],
[4, 0]
])
np.dot(A,B) # On peut aussi écrire A @ B
array([[11, 9],
[39, 45],
[53, 63]])
Attention au dimensions des matrices¶
Attention, pour pouvoir réaliser un produit deux matrices, celle-ci doivent avoir des dimensions compatibles !
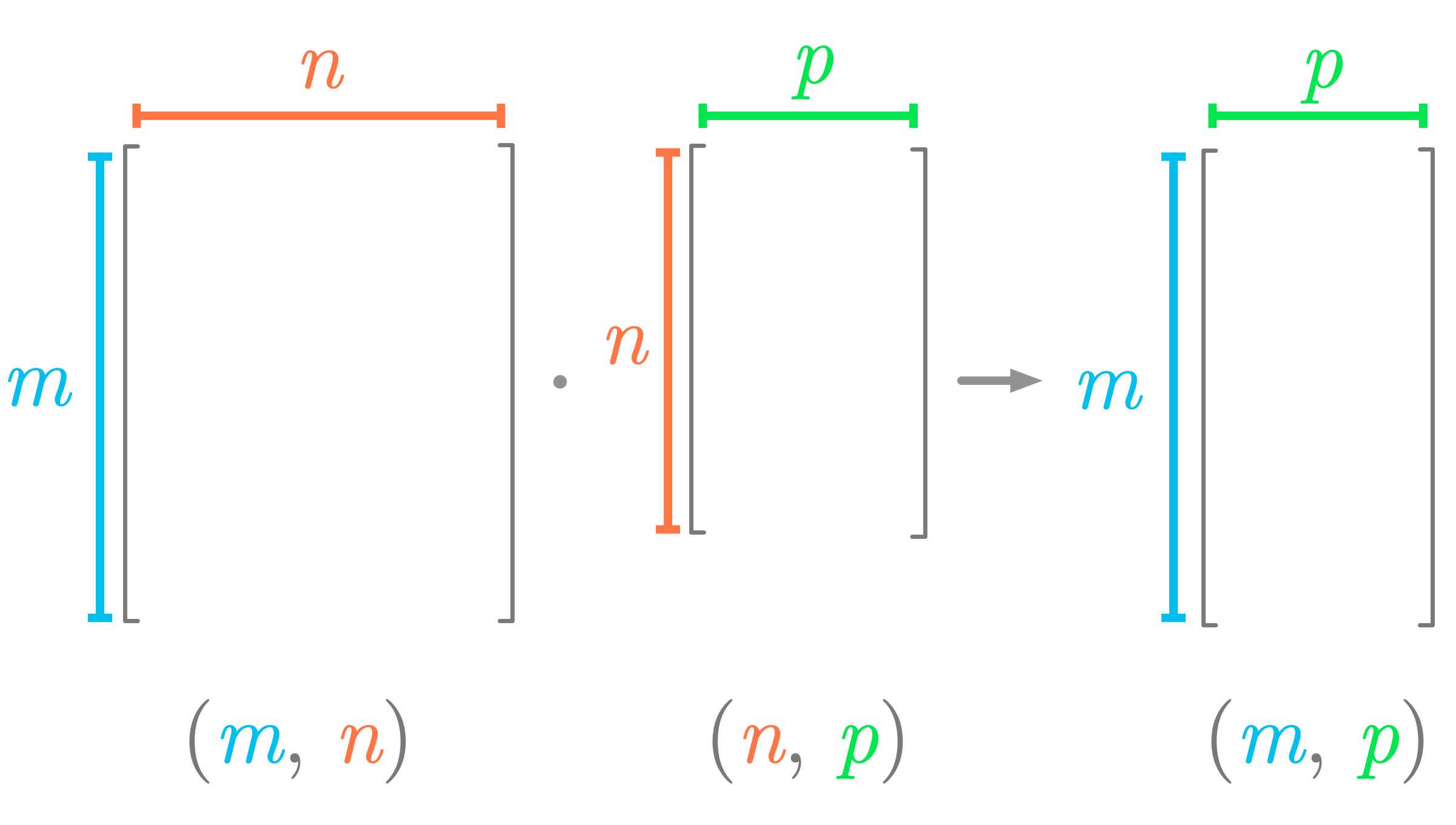 D'après Hadrien Jean
D'après Hadrien Jean
Pour plus de détails concernant les propriétés du produit matriciel, voire cette page dédiée d'Hadrien Jean
La transposée d'une matrice¶
C'est une transformation qui consiste à échanger les lignes et les colonnes d'une matrice. On note $A^T$ la matrice transposée de A
X = np.array([[2.1, 7.9, 8.4],
[3.0, 4.5, 2.3],
[12.2, 6.6, 8.9],
[1.8, 1.3, 8.2]])
X
array([[ 2.1, 7.9, 8.4],
[ 3. , 4.5, 2.3],
[12.2, 6.6, 8.9],
[ 1.8, 1.3, 8.2]])
X.T
array([[ 2.1, 3. , 12.2, 1.8],
[ 7.9, 4.5, 6.6, 1.3],
[ 8.4, 2.3, 8.9, 8.2]])
Autres opérations sur les matrices¶
Certaines opérations plus avancées sont également très utiles en data science :
Quelques matrices caractéristiques¶
La matrice identité¶
C'est une matrice qui ne contient que des 1 sur sa diagonale, 0 ailleurs
Les matrices diagonales et symétriques¶
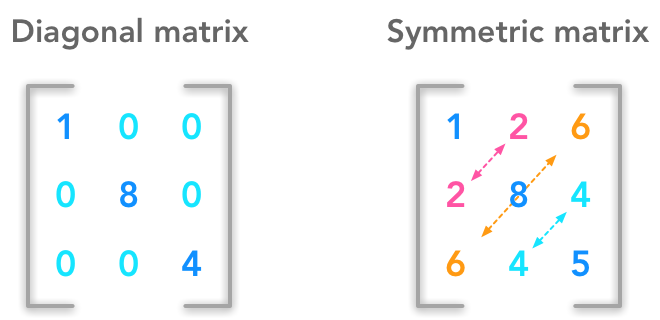 D'après Hadrien Jean
D'après Hadrien Jean
Ces matrices sont intéressantes car elles ont des propriétés qui simplifient certaines formules et calculs dans lesquelles elle sont impliquées
Les matrices comme représentation de transformations linéaires¶
En plus de la vision de structure tabulaire de données, mathématiquement n'importe quelle transformation linéaire (addition et multiplication par un scalaire) peut se représenter par une matrice
Ainsi, chaque colonne d'une matrice représente la transformation d'un vecteur $T(v)$ d'un vecteur $v$ d'un espace donné:
Une matrice permet ainsi de transformer un espace vectoriel de départ en espace vectoriel d'arrivée !
Exemple de transformation d'un vecteur¶
Prenons, la transformation d'un vecteur quelquoncque, $v_1$ :
Si $T$ est une transformation linéaire, on peut écrire :
En résumé, on voit que la transformation linéaire T de $v_1$ se décompose comme le produit des nouveaux vecteurs de base $T(e_1), \dots,T(e_n)$ par $v_1$
Interprétation géométrique¶
Créeons une grille de point dans une espace en 2D. Chaque point de cette grille nous servira a représenter des vecteurs d'un espace vectoriel:
x = np.arange(-10, 10, 1)
y = np.arange(-10, 10, 1)
xx, yy = np.meshgrid(x, y)
plt.scatter(xx, yy, s=20, c=xx+yy);
# the matrix createad this way has a dimension of 20 x 20 = 400 points

Appliquons une transformation $T$ à cet espace¶
On veut appliquer une matrice $T$ à cet espace pour visualiser comment elle transforme cet espace : $$ T = \begin{bmatrix} -1 & 0 \\ 0 & -1 \\ \end{bmatrix}$$
T = np.array([
[-1, 0],
[0, -1]
])
# To apply T (2,2) to our space we have to reshape it to (2,400)
xy = np.vstack([xx.flatten(), yy.flatten()])
xy.shape
(2, 400)
# We apply T to our reshaped matrix
trans = T @ xy
trans.shape
(2, 400)
# we reshape back our transformed matrix to the original space shape
xx_transformed = trans[0].reshape(xx.shape)
yy_transformed = trans[1].reshape(yy.shape)
xx_transformed.shape
(20, 20)
Visualisation de la transformation $T$¶
On visualise le résultat de l'application de T sur notre espace qui correspond a l'application d'une rotation de 90° :
f, axes = plt.subplots(1, 2, figsize=(6, 3))
axes[0].scatter(xx, yy, s=10, c=xx+yy)
axes[1].scatter(xx_transformed, yy_transformed, s=10, c=xx+yy);

Pour plus de détails, voire la page source du blog d'Hadrien Jean
Système d'équation linéaire¶
Exemple¶
Considérons le sytème d'équation suivant :
Représentation graphique¶
Ce système peut se représenter graphiquement par deux droites, dont les coordonnées d'intersection sont la solution du système:
x = np.linspace(-2, 2, 100)
y = 2 * x + 1
y1 = -0.5 * x + 3
plt.plot(x, y);
plt.plot(x, y1);
plt.xlabel('x')
plt.ylabel('y')
plt.axhline(2.6, xmax=0.68, linestyle = '--', color='k');
plt.axvline(0.8, ymax=0.68, linestyle = '--', color='k');

solutions du système¶
Les solutions $x=0.8$ et $y=2.6$ vérifient les coordonnées du sytème:
Ecriture matricielle¶
Notre système d'équation $$ \begin{cases} y - 2x = 1 \\ y + 0.5x = 3 \\ \end{cases} $$
peut se réecrire sous forme matricielle : $$ y \begin{bmatrix} 1 \\ 1 \end{bmatrix} + x \begin{bmatrix} -2 \\ 0.5 \end{bmatrix} = \begin{bmatrix} 1 \\ 3 \end{bmatrix} $$
Interprétation graphique¶
Avec l'interprétation graphique suivante :
 D'après Hadrien Jean
D'après Hadrien Jean
Application : écriture matricielle pour décrire la régression linéaire appliquée à un data set¶
Pour un data set tabulaire contenant $n$ lignes et $p$ colonnes, la régression linéaire peut s'écrire par un système de $n $ équations :
$\hat y_1 = \theta_0 + \theta_1 x_{1,1} + \theta_2 x_{1,2} + \ldots + \theta_p x_{1,p} + \epsilon= \sum{_{i=0}^p \theta_ix_i}+ \epsilon$
$\hat y_2 = \theta_0 + \theta_1 x_{2,1} + \theta_2 x_{2,2} + \ldots + \theta_p x_{2,p} + \epsilon= \sum{_{i=0}^p \theta_ix_i}+ \epsilon$
$\vdots$
$\hat y_n = \theta_0 + \theta_1 x_{n,1} + \theta_2 x_{n,2} + \ldots + \theta_p x_{n,p} + \epsilon= \sum{_{i=0}^p \theta_ix_i}+ \epsilon$
Ce qui se traduit vectoriellement par :
Application : écriture matricielle pour décrire un réseau de neurone¶
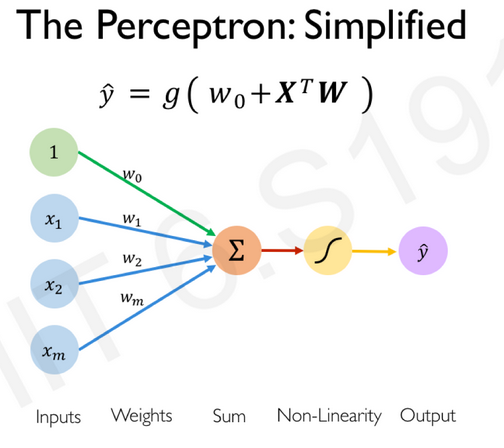
D'après le cours introtodeeplearning du MIT
Une neurone peut s'écrire matriciellement :
Pour un perceptron, la couche cachée $k$ à $i$ neurones, peut s'écrire :
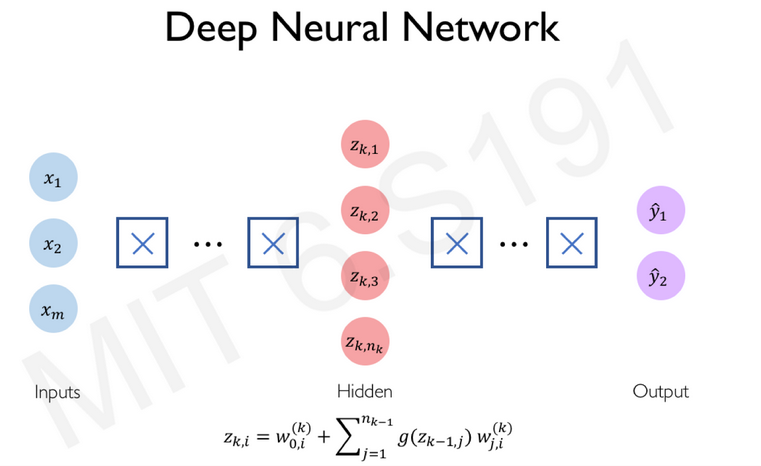
Pour le neurone $i$ de la couche k et le neurones $j$ de la couche k-1 :
Décomposition de matrices¶
Généralités¶
La décomposition (ou factorisation) de matrice consiste à diviser une matrice en plusieurs morceaux.
En data data science, on peut l'utiliser par exemple pour sélectionner des parties des données, dans le but de réduire la dimensionnalité sans perdre beaucoup d'informations (comme par exemple dans l'analyse en composantes principales)
Décomposition en vecteurs propres¶
On peut envisager la décomposition en vecteur propore d'une matrice $A$ comme un changement spécial de base dans laquelle l'espace transformé est une base des vecteurs propres
Vecteurs propres et valeurs propres¶
Exemple de transformation¶
Rappelons que l'application d'une transformation représentée par une matrice $A$ sur un vecteur $u$, donne un nouveau vecteur $v$. Par exemple :
$ v = Au = \begin{bmatrix} 1.2 & 0.9 \\0 & -0.4 \end{bmatrix}.\begin{bmatrix} 1.5 \\1 & \end{bmatrix}$
$v = \begin{bmatrix} 2.7\\ -0.4\\ \end{bmatrix}$
On peut représenter le résultat cette transformation:
u = np.array([1.5, 1])
A = np.array([
[1.2, 0.9],
[0, -0.4]
])
v = A @ u
Représentation graphique¶
plt.quiver(0, 0, u[0], u[1], color="#2EBCE7", angles='xy', scale_units='xy', scale=1);
plt.quiver(0, 0, v[0], v[1], color="#00E64E", angles='xy', scale_units='xy', scale=1);
plt.axhline(y=0, c='k');
plt.axvline(x=0, c='k');
plt.xlim(-1,3)
plt.ylim(-1,3)
plt.annotate('u',(1,1),color="#2EBCE7");
plt.annotate('v',(2,-0.6),color="#00E64E");

On peut remarquer que le vecteur $v$ n'est pas colinéaire à $u$ !
Fabriquer un vecteur colinéaire¶
Que se passerait t'il avec ce vecteur $x$ particulier si on lui applique la matrice $A$ ?
$x = \begin{bmatrix} -0.4902\\ -0.8715\\ \end{bmatrix}$
x = np.array([-0.4902, 0.8715])
y = A @ x
plt.quiver(0, 0, x[0], x[1], color="#2EBCE7", angles='xy',
scale_units='xy', scale=1)
plt.quiver(0, 0, y[0], y[1], color="#00E64E", angles='xy',
scale_units='xy', scale=1)
plt.axhline(y=0, c='k');
plt.axvline(x=0, c='k');
plt.xlim(-1,3)
plt.ylim(-1,3)
plt.annotate('x',(-0.5,1),color="#2EBCE7");
plt.annotate('y',(0.25,-0.5),color="#00E64E");

On peut remarquer que le résultats de $Ax$, le vecteur $y$ est colinéaire (ou scaled) par rapport à $x$ !
On appelle $x$ un vecteur propre de la matrice $A$ : il designe un vecteur qui est contracté ou allongé dû à l'application de $A$ La valeur propre est le scalaire qui donne le facteur de ce scaling
Définition¶
$x$ est un vecteur propre dont les composantes $x_i$ sont associées aux valeurs $\lambda_i$ d'une matrice $A$ si:
Interprétation¶
Intuitivement, on peut l'interpréter comme la transformation qui transforme les vecteurs de l'espace de départ en vecteurs colinéaires (dans l'espace d'arrivée)
On ré-ecrit souvent cette équation de cette manière:
Ou $I$ est la matrice identité
Attention : les vecteurs propres ainsi trouvés ne sont pas uniques !! (on peut multiplier lambda par un scalaire et obtenir des valeurs différentes pour $x_i$)
Reconstruction de la matrice originale¶
Si on connait les vecteurs propres $x$ et leurs valeurs propres $\lambda$ associées, on peut reconstruire la matrice $A$ originale:
ou $\Lambda$ est la matrice transformée
Un des intérêt principaux de la décomposition de matrice consiste à reconstruire la matrice originale en ayant gardé uniquement un certain nombre de paires de valeurs/vecteurs, sans trop perdre d'information
Pour l'explorer plus en détail, voir cette la page interactive de setosa.io
Intuition de l'Analyse en Composantes Principales (ACP)¶
Principe¶
Il s'agit d'une méthode de décomposition de matrice en vecteurs propres très populaire, qui est souvent utilisée pour réduire le nombre de variable de votre data set de départ
Elle se calcule en factorisant la matrice de covariance des variables de votre data set
Intuition du résultat¶
Intuitivement, en appliquant la PCA vous calculez un changement de base de votre espace (d'origine) pour former un nouvel espace (d'arrivée) dans lequel les vecteurs de bases sont orthogonaux, maximalement non corrélés, et capturent chacun les directions principales de variance dans votre data set

D'après Nicoguaro
Reduction des composantes¶
En caclulant une ACP sur vos variables de départ, vous obtenez des paires vecteurs propres (appellées ici composantes) et valeur propres, sélectionnez celle qui expliquent le plus de variance dans votre data set et reconstruisez votres data set de départ en ayant exclus certains de ces vecteurs propres
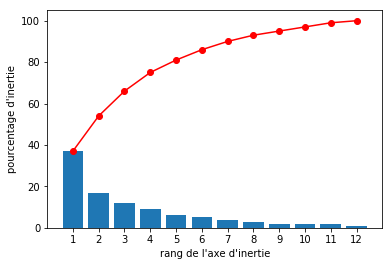
D'après Open Classroom
Pour aller plus loin¶
Pour développer une intuition de cet algorithme, allez tester la page interactive de setosa.io
Pour un peu plus de détails, voir cet article d'Hadrien Jean ou le cours dédié d'Open classroom