Schéma-bloc
On propose le schéma-bloc suivant du système "vérin seul". L'objectif est d'asservir la la position de la tige à la position de consigne entrée par l'utilisateur.
Les grandeurs utilisées dans tout le document sont définies sur ce schéma-bloc.
Le schéma-bloc peut être simplifié en remplaçant la boucle de vitesse par une fonction de transfert unique (cf. schéma ci-dessous).
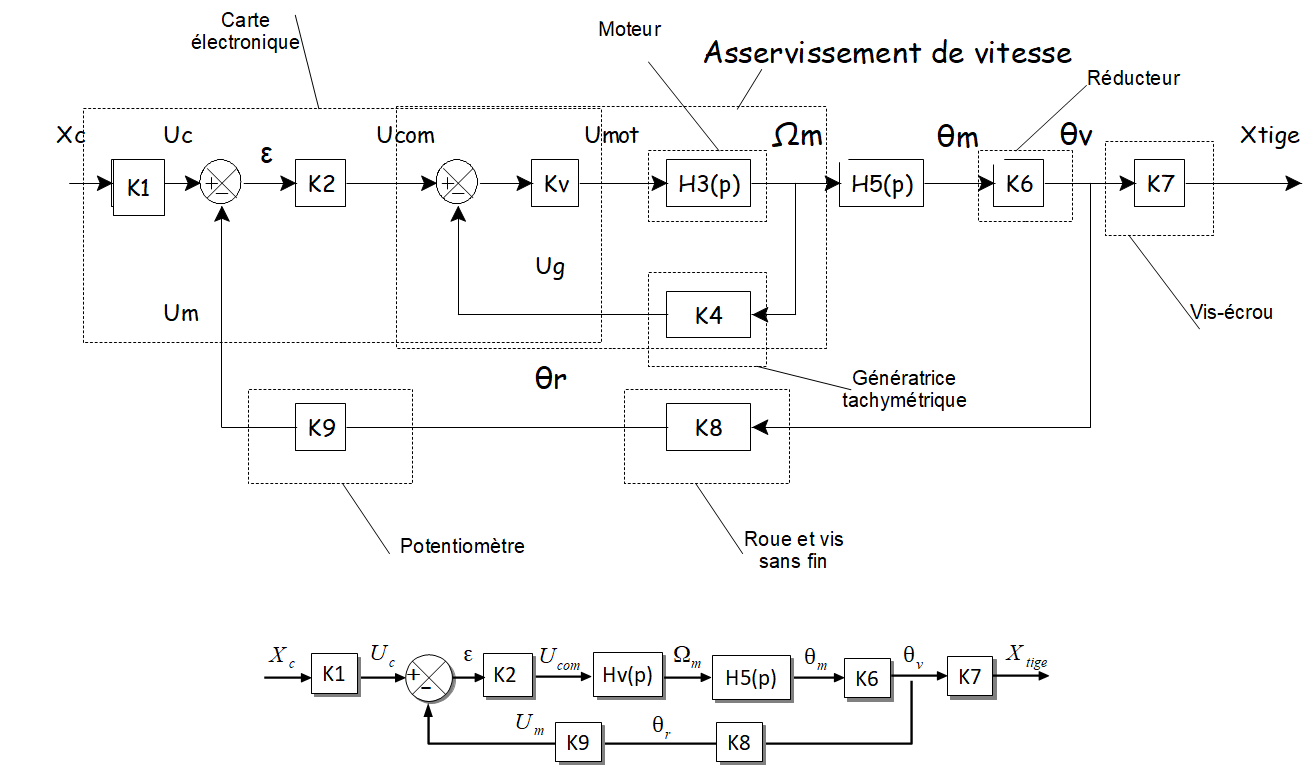
Avec
Uc, Ucom, Umot, Ug et Um des tensions en Volt
Xc position de consigne en mm
Xtige la position réelle en mm
la vitesse de rotation du moteur en rad/s
la rotation de l'axe du moteur en rad
la rotation de la vis en sortie du réducteur en rad
la rotation en sortie du réducteur roue-vis avant le capteur en rad
Il est nécessaire d'analyser les caractéristiques de chaque constituant pour déterminer les différents blocs. Plusieurs expériences permettent également de vérifier les résultats déterminés théoriquement (cf. partie Manipulations)