Présentation du système
Les robots haptiques
Les robots haptiques sont issus du champ scientifique du sens du toucher. Il s'utilise dans le domaine médical, la télérobotique dans les zones à risques, dans l'univers des jeux avec réalité virtuelle et de nombreux autres domaines.
Le robot haptique proposé par SET est issu de l'univers du jeu en réalité virtuelle sur ordinateur. Son concept, ses performances et sa souplesse d'emploi en ont fait très rapidement un outil très prisé, en
particulier dans la recherche, dans des domaines tels que l'entraînement en réalité virtuelle ou en réalité
augmentée pour des applications médicales ou de téléopération.
Sa conception originale, de type robot delta comportant 3 chaînes cinématiques, avec moteurs + codeurs, asservies en position et/ou en effort, lui permet de fonctionner aussi bien en interface haptique qu'en robot.
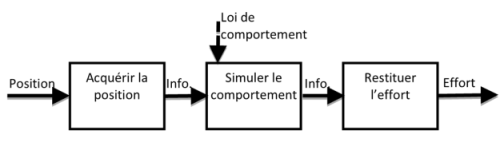
Une interface haptique est une interface homme-machine mais également une interface machine-homme. En effet, en plus d'acquérir des informations en provenance de l'utilisateur, telles que l'acquisition de position d'une manette, elle permet simultanément de restituer sous forme d'effort des informations à l'utilisateur, à l'instar des vibrations associées aux touches d'un clavier virtuel de téléphone ou des efforts associés à une manette (ou volant) à retour d'effort.
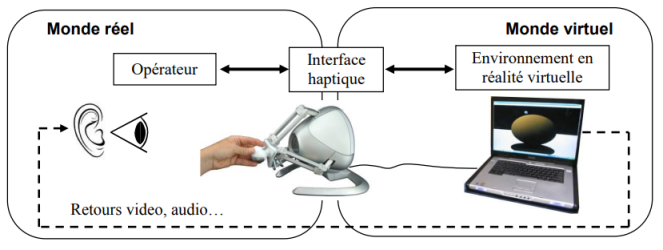
L'interface haptique peut être utilisée en interaction avec un environnement virtuel (jeu, apprentissage de gestes chirurgicaux, mise au point d'environnement de travail...) ;
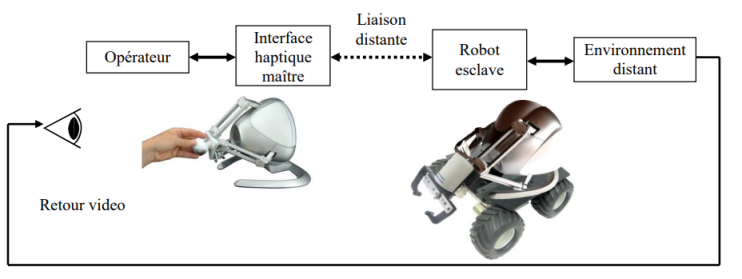
L'interface haptique peut être utilisée en interaction avec un robot esclave (chirurgie à distance, télé-manipulateur de robot en environnement hostile...). L'effort restitué est fonction de la position acquise, selon une loi de comportement qui doit refléter l'environnement virtuel ou le robot esclave.
Situation d'utilisation
Téléopération : L'interface est utilisé pour piloter un robot distant. Elle peut aussi faire ressentir les actions du robot distant à l'utilisateur.

Souris 3D : L'interface peut acquérir des mouvements de l'utilisateur dans les trois directions de l'espace.
Souris 3D : L'interface peut acquérir des mouvements de l'utilisateur dans les trois directions de l'espace.


Retour Haptique : L'interface capte les déplacements de l'utilisateur et lui renvoie des
sensations d'effort conformes à une application virtuelle. On parle de réalité virtuelle.