La carte de commande
La carte de commande est constituée de plusieurs éléments et réalise les opérations suivantes :
conversion de l'angle de consigne en grandeur comparable à celle du capteur.
correction de l'écart en consigne de vitesse saturée.
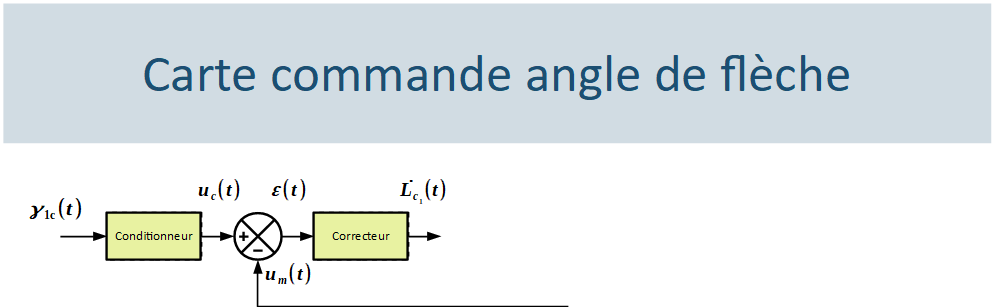
Le conditionneur
L'intérêt de ce composant est de faire en sorte que l'écart soit proportionnel à l'erreur entre l'angle de consigne du bras et l'angle réel du bras.
Le correcteur
La carte de commande intègre un correcteur P.I.D numérique. Il est possible de regarder la documentation constructeur intégrée au logiciel de mesure qui précise l'algorithme que réalise la carte de commande pour obtenir le fonctionnement d'un correcteur P.I.D.
Une modélisation linéaire de cet algorithme permet d'obtenir la fonction de transfert suivante : \(C(p)=K_p\Bigg(1+\frac{K_i}{p}+K_dp\Bigg)\).
Attention :
On pourra mettre en évidence à l'aide des expériences proposées la saturation du correcteur et l'utiliser dans la modélisation retenue.