Schéma-bloc
On propose le schéma-bloc suivant du système. L'objectif est d'asservir le déplacement angulaire du bras \(\theta_b\) à la consigne de déplacement \(\theta_c\) entrée par l'utilisateur. Les grandeurs utilisées dans tout le document sont définies sur ce schéma-bloc.
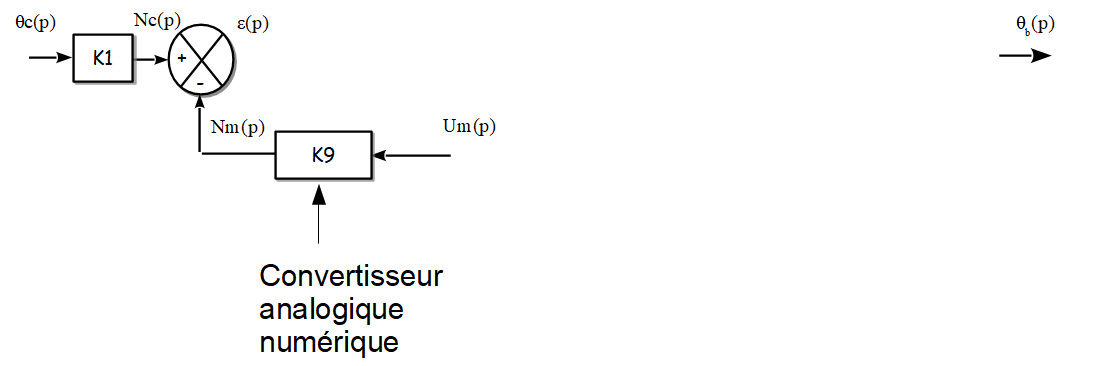
avec :
\(\theta_c\) : angle de consigne définie par l'utilisateur (en °)
\(\theta_b\) : angle réel du bras (en °)
\(\theta_v\) : vitesse angulaire du moteur (ou de la vis liée à l'arbre moteur) (en rad/s)
\(\epsilon\) : écart corrigé par le correcteur numérique
\(N_c\) : grandeur numérique image de l'angle de consigne (en point)
\(N_m\) : grandeur numérique image de la tension délivrée par le potentiomètre (en point)
\(U_m\) : tension en sortie du potentiomètre (en Volt)