Structure générale
Principe
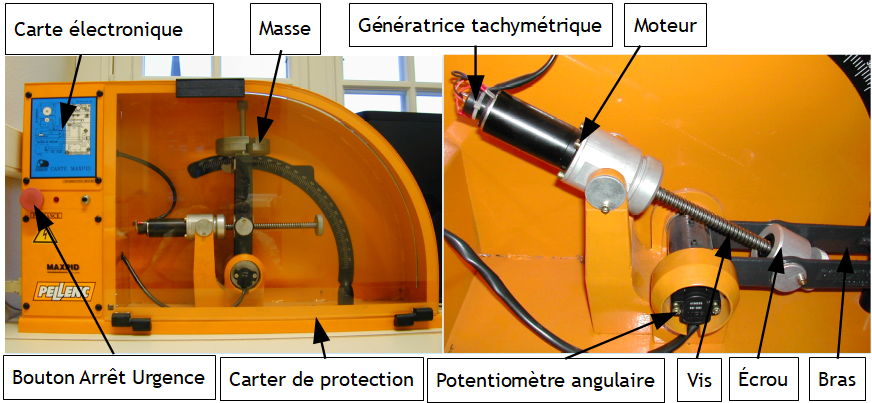
Le bras du Maxpid est mis en mouvement par l'intermédiaire d'un système vis/écrou et d'un ensemble de liaisons entre les différentes pièces du mécanisme. La vis est entraînée par un motoréducteur. Un capteur angulaire permet de mesurer l'angle de rotation du bras par rapport au châssis. Le moteur est piloté en tension par un hacheur situé à l'intérieur de la carte de commande numérique (à l'intérieur du châssis orange). La carte traite les informations transmises par le capteur angulaire, compare cette valeur à la consigne de position angulaire et élabore la commande du hacheur.
Une génératrice tachymétrique a été ajoutée et permet de mesurer la vitesse de rotation de la vis par rapport au corps du moteur.
Photos des composants participant à l'asservissement