Architecture
Éléments constitutifs de base
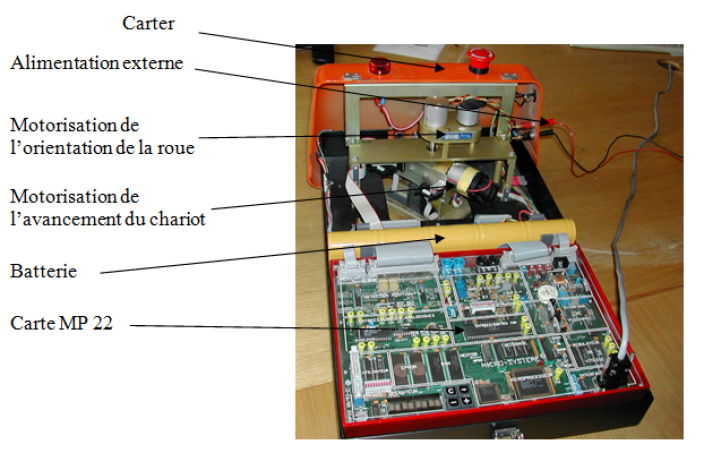
Le chariot est constitué de plusieurs sous-systèmes :
un châssis en aluminium supportant l'ensemble des sous systèmes;
un carter supportant différents capteurs et systèmes d'interface home/machine ;
un support moteur d'orientation sur lequel sont fixés le moteur de direction, un réducteur et le capteur de position angulaire,
un support moteur d'avance lié à l'arbre de sortie de direction sur lequel sont montés un moteur, un capteur , un réducteur et la roue directrice et motrice ;
de deux roues libres ;
d'une carte comportant de nombreux composants électroniques
d'une batterie ou d'un système d'alimentation externe.
Les différents capteurs de l'environnement
Bien qu'apparemment simpliste, ce système didactisé comporte de nombreuses possibilités de détection de l'environnement afin d'assurer au mieux sa fonction principale.
On peut recenser :
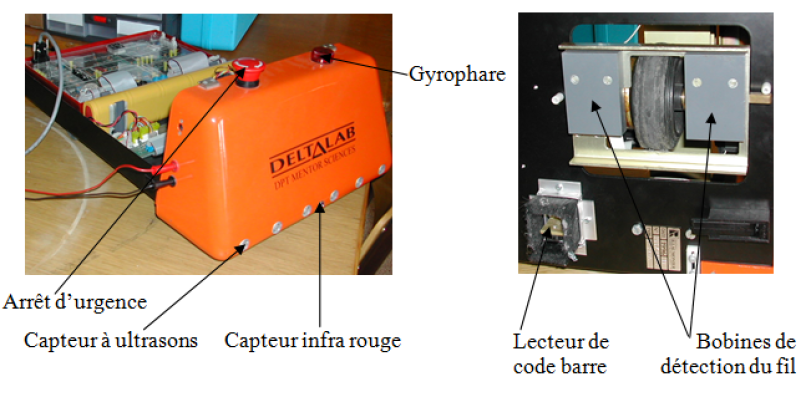
un capteur à ultrason permettant de détecter suivant 3 directions (avant gauche, avant et avant droite) la présence d'un obstacle ;
un capteur de choc, lié au pare-chocs avant, permettant de détecter une collision ;
un lecteur code barre, qui permet de lire des codes barre positionnés sur le sol ;
deux capteurs de détection du champ magnétique générer par le passage d'un courant alternatif dans le fil ;
un capteur infrarouge permettant de réceptionner les signaux émis par la télécommande ;
Les interfaces de communication
Pour se déplacer d'un poste de travail à un autre, le chariot doit recevoir des informations :
de l'opérateur (à l'aide de la télécommande) ;
de l'unité centrale (ordinateur) ; elle fixe la configuration générale du chariot, lui indique le poste auquel il doit se rendre... ;
des postes de travail devant lesquels il passe.
Les différents moyens de communication du chariot avec un opérateur, ou un autre système sont les suivants :
8 afficheurs 40 diodes permettant de visualiser le mode de fonctionnement du chariot ;
un clavier sommaire à quatre touche permettant, en association avec l'afficheur, de paramétrer à l'aide de menus « déroulant » le fonctionnement du chariot ;
une interface binaire comportant 8 entrées et 8 sorties ;
une liaison série RS232 permettant la communication avec un poste fixe ;
Un klaxon et un gyrophare permette d'indiquer que le chariot est en déplacement.
L'opérateur peut stopper tout mouvement par l'intermédiaire d'un bouton d'arrêt d'urgence.